
Les SRT80 sont des vérins basés sur des servos moteurs 80ST, des profilés aluminium 80×80, et une vis à bille spéciale qui permet un débattement de 220mm (contre environ 130mm pour les OpenSFX).
Ils peuvent être pilotés par Simhub, FlyPT ou Simtools.
Pour chaque étape, il y a un salon dédié sur le Discord pour vous aider (aller dans SRT80 FRENCH après avoir choisi la langue dans verify-first.
Sommaire :
- Comment démarrer
- Fonctionnement
- Liste de courses
- Control Box
- Cablage
- Paramétrer les drivers
- Code Arduino
- Simhub
- FlyPT
- Simtools
- Fichiers 3D
- Assemblage
- FAQ
1) Comment démarrer
Toute la documentation nécessaire est disponible sur cette page. Si vous avez des questions, la FAQ est là pour y répondre, et si vous n’y trouvez pas votre bonheur, faites-donc un tour sur le Discord pour y retrouver toute la communauté !
Les SRT80 sont très proches dans leur fonctionnement des OpenSFX100. Le site opensfx.com constitue donc une source d’informations complémentaires.
Pour réussir ce projet, il est nécessaire de tester votre travail à chaque étape : les moteurs seuls, le mécanisme seul, puis les deux ensembles, puis le tout sur votre simulateur.
Je réitère l’avertissement : Les voltages, les couples et vitesses sont importants. Prenez toutes les précautions nécessaires. Je me dégage de toute responsabilité en cas de problème.
2) Fonctionnement
Les vérins SRT80 sont basés sur une vis à bille sur laquelle se trouve un écrou à bille. Celui-ci monte ou descend lorsque la vis tourne. La vis est solidaire de l’axe d’un moteur appelé “servo moteur”. Le servo moteur est contrôlé par un driver. Le driver reçoit les instructions de l’arduino qui lui dit de combien de degré tourner (pulse), et dans quelle direction (dir).
Les vérins SRT80 sont compatibles avec Simhub, FlyPT et Simtools. Ces logiciels traitent les données du jeu et les envoies à l’arduino de la Control Box.
Les drivers des servos sont activés par la carte Arduino. Une fois actif, les drivers standard émettent un très léger bruit aïgu, bruit couvert par le fonctionnement général du simulateur. Le fournisseur propose aussi une version totalement silencieuse, mais plus onéreuse.
3) Liste de course
La liste de course est disponible ici. Le kit proposé par Industry&CNC est proposé en livraison économique (livraison par train, indiquée par “seller’s shipping method”). Ce moyen de livraison prend environ un mois (ne pas prendre en compte l’estimation Aliexpress). Il est à souligner que le numéro de suivi fournit par Industry&CNC ne sera fonctionnel que sur la fin du transport.
Par ailleurs, n’hésitez pas à contacter Industry&CNC si les tarifs ou les frais de ports sont aberrants. On a essayé de proposer les meilleurs tarifs sur tous les moyens de livraisons, mais il peut rester quelques erreurs liés au système.
La liste de course est donc séparée en deux parties : la première indiquant ce qui est inclu dans le kit, et la deuxième ce qui ne l’est pas, et doit donc être commandé à part.
Elle donne le détail des pièces nécessaires pour fabriquer un vérin. Industry&Cnc propose une remise sur la plus part des articles lorsque qu’on en achète 4.
La liste de course des Control Box est détaillée dans la documentation de chaque Control Box.
“Quelle est la différence entre le driver standard et le noiseless ?” Contrairement aux drivers noiseless, les drivers standard émettent un petit bruit aigu lorsqu’ils sont actifs. Ce bruit aigu est couvert par le fonctionnement du simulateur.
4) Control Box
La control box qui acceuille l’arduino est disponible en plusieurs versions. Les versions DIY (standard et smart Control Box) nécessitent des soudures de câbles et flasher un code arduino.
La version Competition est livrée prête à l’emploi, il suffit de brancher des câbles DB25. La version Competition est fournie avec le maker pack.
| Standard Control Box | Smart Control Box (exclusivité Patreon) | Competition Control Box |
 |  | 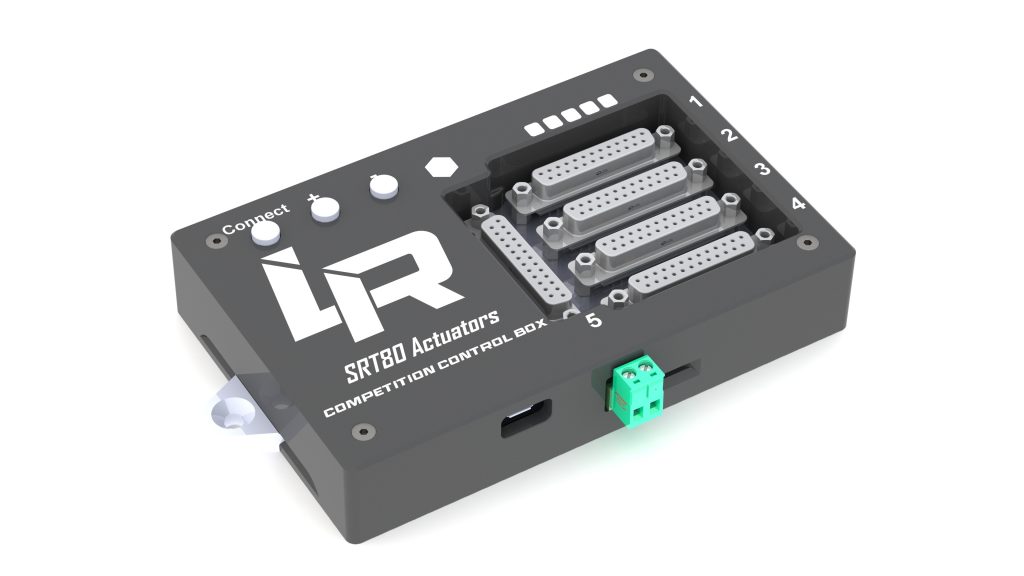 |
| – 4 vérins | + 4 vérins + TL + 3 boutons assignables + Led de feedback : connection, erreur | + 4 vérins + TL + 3 boutons assignables + Led de feedback : connection, erreur, statut des moteurs + Plug and Play |
| Documentation complète | Documentation complète | Documentation complète |
5) Cablage
Attention : Les voltages, les couples et vitesses sont importants. Prenez toutes les précautions nécessaires. Je me dégage de toute responsabilité en cas de problème.
a) Alimentation du driver et des moteurs
Difficile de se tromper dans le câblage du moteur. Cette partie est détaillée page 8 et 13 du manuel des drivers.



b) Cablage entre Arduino et driver (pour Control Box standard et Smart uniquement)
Le câblage de la Smart Control Box est complémentaire à celui ci-dessous. Vous pouvez très bien câbler comme indiqué ci-dessous puis tester le code de base avant d’ajouter le câblage spécifique à la Smart Control Box disponible sur cette page.
On réutilise les connecteurs pulse/dir sur la prise DB25 de chaque driver. Côté arduino on utilise un connecteur GX12 5 pins.
| Motor 1 | Motor 2 | Motor 3 | Motor 4 | DB25 PIN | |
| STEP | 8 | 9 | 10 | 11 | 3 |
| DIR | 4 | 5 | 6 | 7 | 4 |
| ENA | A0 | A0 | A0 | A0 | 6 |
| 5V | 5V | 5V | 5V | 5V | 9 |
| GND | GND | GND | GND | GND | 5, 10, 14 |
En schéma :
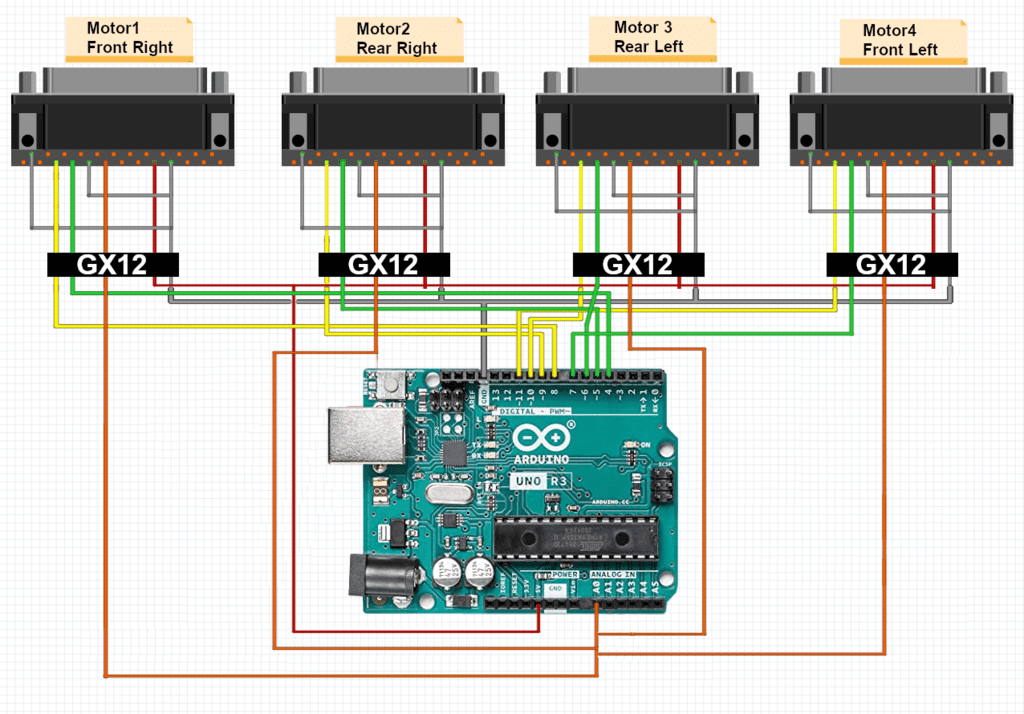
| Arduino | Driver (prise DB25) | |
| Pulse | D8/D9/D10/D11 | pin 3 |
| Direction | D4/D5/D6/D7 | pin 4 |
| Enable | A0 | pin 6 |
| 5V | 5V | pin 9 |
| Masse | GND | pin 14/5/10 (les trois pins de chaque DB25 doivent être reliés à la masse) |
6) Paramétrer les drivers
Les drivers, similaires aux AASD, possèdent 200 paramétres, heureusement on a pas besoin de tous les modifier.
Ils sont détaillés page 38 du manuel. Cette vidéo montre comment modifier les paramètres.
Il faut tester tester le fonctionnement du moteur via Simhub avec le moteur démonté !
| Paramètre | Valeur | Explication | Remarque |
| Pn001 | 4 | Sélectionne le bon moteur, en l’occurence un 80st-M02430 | Inutile d’utiliser un moteur plus puissant |
| Pn002 | 2 | Mode de contrôle du moteur | 2 : position mode |
| Pn003 | 0 | Active/désactive le driver | 0 : le driver est alumé par l’arduino. 1: le driver est tout le temps allumé |
| Pn008 | 300 | Limite de couple | |
| Pn009 | -300 | Limite de couple | |
| Pn024 | 25 | ||
| Pn051 | 1200 | Vitesse max de rotation du moteur | Ce paramètre gère un peu la “violence” du simulateur, donc à augmenter avec parcimonie |
| Pn060 | 2 | Sélection de l’info de sortie sur le port 1 | Envoi l’info moteur prêt |
| Pn062 | 6 | Sélection de l’info de sortie sur le port 3 | Envoi l’info couple maximal dépassé |
| Pn098 | 12 | Multiplicateur de pulsation | 12 à partir du firmware v2.1, 6 jusqu’au firmware v2.0 |
| Pn109 | 1 | Paramètre de filtrage | Voir le manuel |
| Pn110 | 30 | Paramètre de filtrage | Voir le manuel |
| Pn113 | 20 | Paramètre de filtrage | Voir le manuel |
| Pn114 | 10 | Paramètre de filtrage | Voir le manuel |
| Pn115 | 15 | Paramètre de filtrage | Voir le manuel |
7) Code Arduino
Arrivé à cet étape vous avez vos moteurs câblés à l’Arduino, mais non reliés au reste de la mécanique. Vous pouvez flasher votre carte arduino avec le code spécifique à votre Control Box (comment flasher un code). La Competition Control Box est livrée déjà flashée.
On va pouvoir tester la connexion entre l’arduino et le logiciel que vous utilisez (Simhub, Flypt ou Simtools). Une fois la connexion vérifiée, et les moteurs testés, vous pourrez passer à l’assemblage de la mécanique.
8) Simhub
- activer le plugin Motion en cliquant sur add/remove features, puis activer le plugin motion :

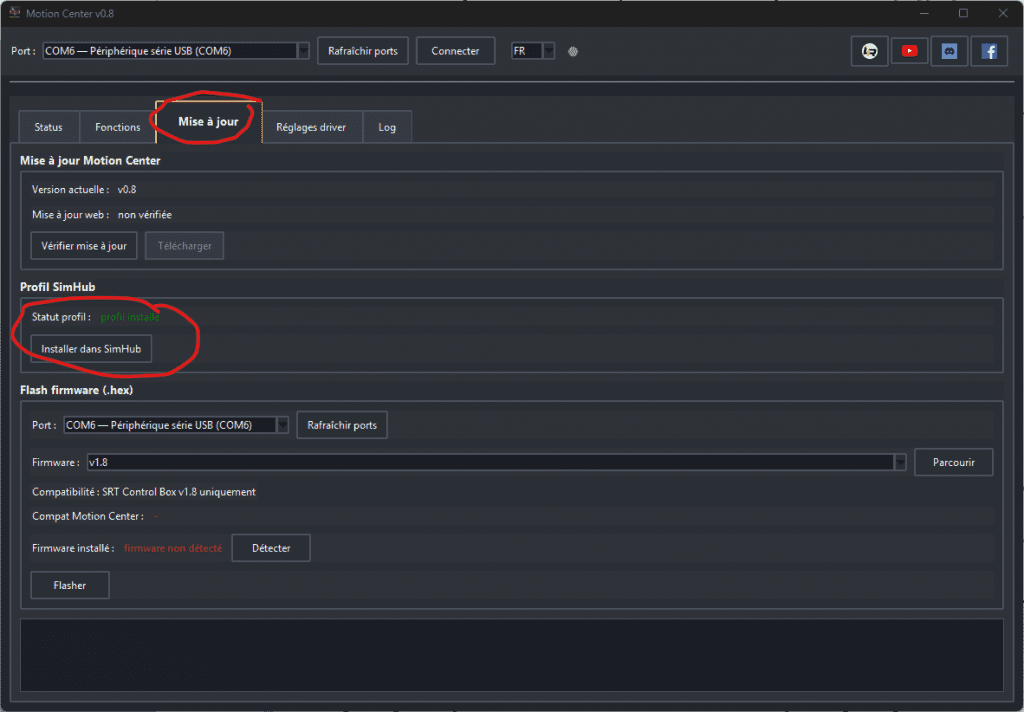
2. Installez le profil simhub via le logiciel Motion Center : cliquer dans l’onglet “Mise à jour”, puis sur le bouton “Installe dans Simhub”.
3. Activer les effets comme suit, puis cliquer sur l’onglet “Output settings” :

4. Cliquer sur “Add new controller”, puis sélectionner “SRT80 Competition control box – Firmware V1.8”. Si cette option n’est pas présente, c’est que l’étape 2 a été mal réalisée.
5. Sélectionner le bon port USB pour la Competition Control Box.
6. Cliquer sur “Edit axis assignements” et renseigner :

7. Vous pouvez maintenant cliquer sur “Enable Motion”, le simulateur est prêt. Selon les options que vous avez choisi, le simulateur peut n’être actif qu’en jeu
9) FlyPT
Toute l’électronique est prête : Arduino flashée et reliée aux drivers, drivers paramétrés, et moteurs connectés, sans la partie mécanique.
Vous pouvez maintenant utiliser le profil FlyPT dédié (vidéo de présentation de FlyPT).
Pour charger le profil FlyPT, lancer FlyPt (v3.5.3), clique droit>file>open et sélectionner le profil.
Pour finaliser l’installation, cliquer sur la tuile « Output::serial », puis sur « update ports » et dans la liste « port » sélectionner le port de l’arduino. Ensuite il suffit de cliquer sur « connect ». Les moteurs sont sensés tous tourner dans la même direction de manière fluide puis s’arrêter : c’est le simulateur qui part de la position basse jusqu’à la position du milieu. Cliquez maintenant sur déconnecter, et les moteurs effectue le même mouvement dans l’autre sens : le simulateur passe de la position du milieu à la position basse. Si tout s’est bien passé, vous pouvez continuer. Sinon RDV sur le Discord.
Maintenant vous pouvez connecter une source (n’importe quel jeu que vous possédez), puis recliquer sur connecter dans “output::serial”, et aller en jeu vérifier si les moteurs réagissent bien. Attention chaque jeu peut nécessiter un paramétrage spécifique pour être connecté à Flypt.
Le site de FlyPT contient une documentation qu’il est nécessaire de lire si vous souhaitez en tirer profit.
Aucun problème informatique ou électronique, vous pouvez passer à l’assemblage.
Une fois vos vérins fonctionnels et votre installation bien rodée, je vous conseille aussi de regarder cette vidéo pour comprendre comment utiliser les filtres.
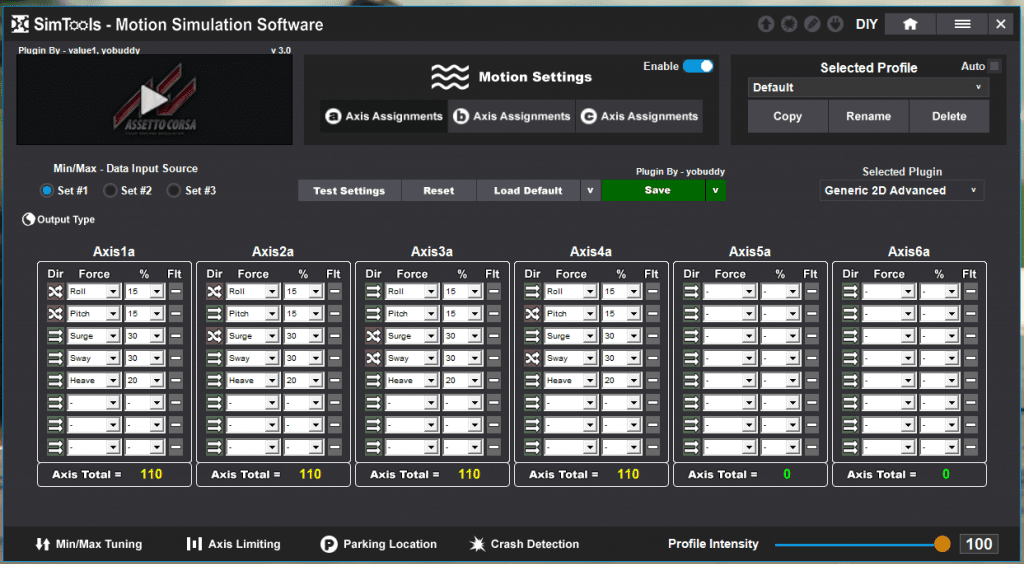
10) Simtools
Configuration pour Simtools, Control Box Competition, Firmware V1.9et plus récent :
Startup Output : ENABLE<10><13>
Interface – Output : P<Axis1a><Axis2a><Axis3a><Axis4a><Axis5a><Axis6a>
Shutdown – Output : DISABLE<10><13>
Configuration pour Simtools, Control Box DIY ou ancien firmware :
Voici la configuration pour Simtools V3.
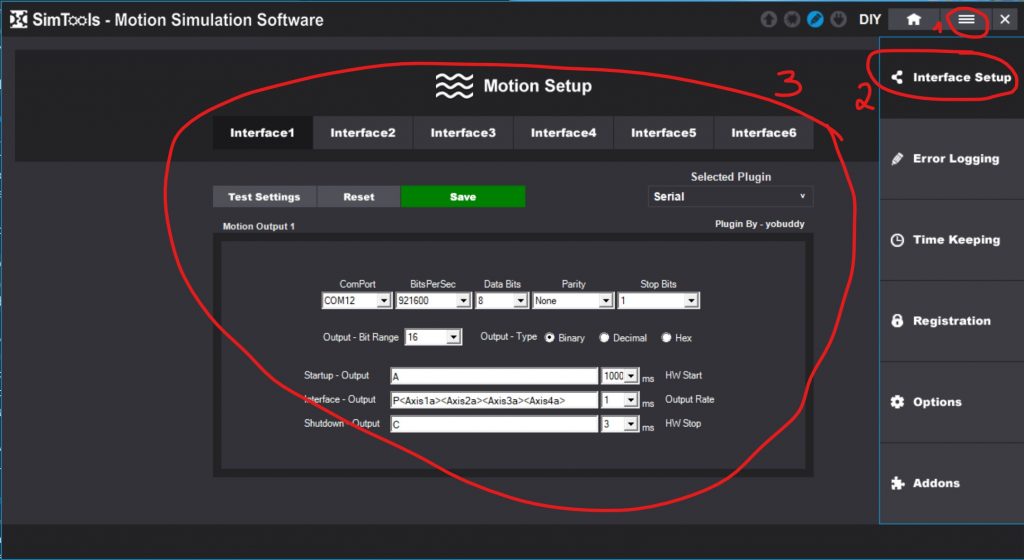
EDIT : ce n’est pas un P, mais un T
Et voici l’affectation des axes :

Vous pouvez lancer le jeu et vérifié si le comportement est le suivant :
1) Tous les moteurs tournent dans le même sens au démarrage (le simulateur passe de la position basse à la position du milieu)
2) En jeu, les moteurs semblent suivre les mouvements de la caisse
3) Lorsqu’on quitte le jeu, les vérins effectuent le mouvement inverse du 1), le simulateur passe de la position du milieu à la position basse.
Si le comportement est ok, poursuivre avec l’assemblage
11) Fichiers 3D
Les fichiers 3D sont disponibles sur cette page.
Si vous ne possédez pas d’imprimante 3D, vous pouvez me les commander ici.
Chaque fichier contient une consigne d’impression sous la forme xx-xx. Le premier nombre est la précision, le second le remplissage. Par exemple 02-30 signifie précision de 0,2 et remplissage à 30%. Il est utile aussi de doubler l’épaisseur des murs.
La mention “support” indique qu’il faut des supports…
Toutes les pièces sont dans l’orientation idéale pour l’impression.
12) Assemblage des vérins
13) FAQ
Mon installation électrique est en 110V, que faire ? (ex : Canada)
A priori les servos sont conçus pour fonctionner en 220v. Vous pouvez acheter un convertisseur 110v>220v (Amazon), ou alors paramétrer les drivers pour accepter du 110V, à vos risques et périls évidemment.
Est-ce que je peux utiliser ces vérins en Push-Pull ?
Oui, il suffit de visser une rotule en 22mm comme une POS22.
Pourquoi je ne vois pas d’informations sur le bouton d’arrêt d’urgence ?
En gros il y a deux défaillances qui peuvent avoir lieu : soit le moteur se met à tourner sans fin dans un sens, soit dans l’autre. Dans un cas, le slider vient en butée du support de roulement linéaire, et bloque le moteur : aucune conséquence dramatique. Dans l’autre cas, le slider peut casser le support de roulement linéaire, puis sortir de la tige. Là c’est moins drôle. Le problème, c’est que le moteur est tellement rapide que vous n’aurez probablement pas le temps de couper… C’est pour cette raison que je ne l’intègre pas dans mes montages en général. Un port dédié est cependant prévu sur la Competition Control Box.
Mon châssis saute sur les gros mouvements, comment l’éviter ?
Les vérins sont sufisamment puissants pour faire sauter le châssis. Il faut limiter la vitesse des vérins ou alors fixer le vérin au sol.
Simhub, FlyPT ou Simtools ?
J’utilise personnellement Simhub car cela évite d’ajouter un autre logiciel. En terme de ressenti, on peut obtenir le même résultat peut importe le logiciel utilisé.
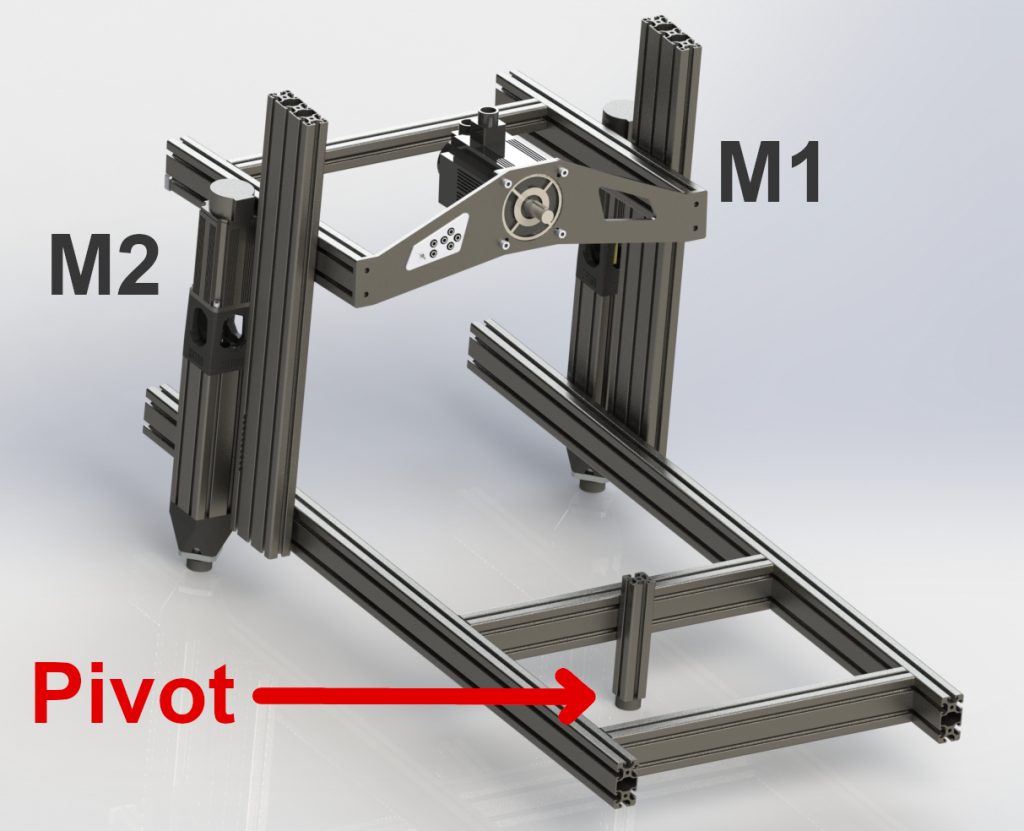
Configuration 2 vérins ?
La configuration 2 vérins permet d’obtenir un simulateur 2DOF de qualité, et de limiter la dépense avant d’éventuellement ajouter les 2 autres vérins. Pour ce faire, vous devrez prévoir un pivot qui sera positionné au niveau du centre de gravité. Un pied amortisseur fait très bien l’affaire. Les deux vérins se positionne à l’avant. Le M1 est l’avant droit, le M2 l’avant gauche. Vous pouvez ensuite utiliser ce profil FlyPT spécifique.
Configuration 3 vérins ?
La configuration 3 vérins est déconseillée : elle permet effectivement d’obtenir un 3DOF, comme avec 4 vérins. Mais le positionnement des vérins en triangle rend le châssis instable et ne permet pas de profiter de la puissance de ces vérins. Par ailleurs cela impose de positionner le “vérin du milieu” assez loin devant ou derrière, ce qui réduit le débattement angulaire.
Je n’utilise pas la control box Competition et je veux câbler le 5ème vérin, quels sont les pins ?
Pulse sur A2, Dir sur A3, et le pin de calibration est A1.



Salut, la partie assemblage sera en ligne bientôt ?
Merci a toi
Oui
Bonjour, j’imagine que la liste de course c’est pour 1 vérin ?
Oui
Bonjour
je ne trouve pas les tarifs?
Merci
Bonjour, il faut cliquer sur le lien dans la partie Liste de course.
Merci pour tout ces renseignements, je suis à deux doigt de prendre le kit de 4 vérins.
J’ai deux questions :
– Si on fait le choix de la contol box plug & play, du coup ce n’est pas tout à fait la même liste, il faut acheter 4x câbles DB25 pour relier les drives à la box, c’est bien ça ?
– As tu des plans de châssis pour une fabrication en profilé alu ?
les câbles db25 sont inclus dans les kits mécaniques qu’on commande chez I&C.
Je n’ai pas de plan de châssis désolé
Je vais faire des recherches ça doit être facile à trouver. Au moins les positions des vérins par rapport au centre de gravité.
D’ailleurs je suis plutôt lourd, 100kg, pas de soucis avec la puissance des moteurs du kit ?