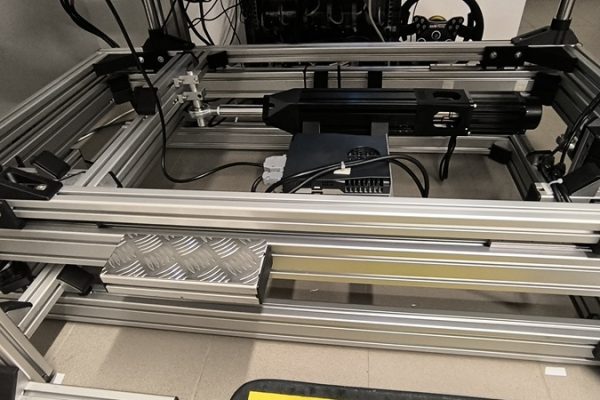
Le Traction Loss permet de ressentir la sensation de décrochage du train arrière.
Côté Châssis, la liste de course inclut deux cadres :
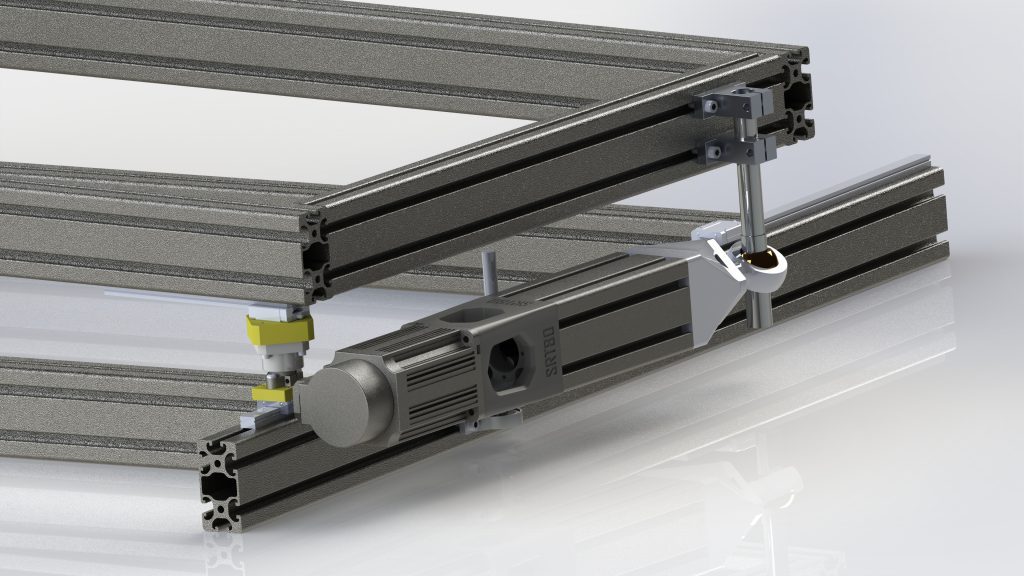
- Cadre inférieur : celui qui sera fixe, et qui reçoit le vérin SRT80. Ce n’est pas tout à fait un rectangle puisque le profilé arrière est plus long pour acceuillir les rails.
- Cadre supérieur : celui qui pivote. Ce cadre peut être celui qui reçoit votre siège, ou vous pouvez aussi poser un châssis 4 vérins.
Tout changement de géométrie modifie toutes les longueurs des pièces. Par conséquent si vous vous éloignez des dimensions proposées, vous aurez probablement à revoir la longueur de certaines pièces. Les longueurs proposées pour les rails sont légèrement sur-dimensionnés afin de permettre de s’ajuster à des géométries approchant celle proposée.
1) Liste de course :
La liste de course n’inclut pas les équerres.
Châssis :
Dimensions châssis inférieur: 70cm x 124cm
- 1 x 8040 62cm
- 2 x 8040 120cm
- 1 x 8040 110cm
Dimensions châssis supérieur: 70cm x 130cm
- 2 x 8040 62cm
- 2 x 8040 130cm
Les profilés peuvent être commandés n’importe où. En France, je recommande Motedis.
Rotules/roulements/palliers :
3 x SHF12 (Aliexpress)
3 x FK12 (Aliexpress)
2 x SK12 (Aliexpress)
2 x SK20 (Aliexpress)
2 x KP001 (Aliexpress)
1 x POS22 (male thread-right, M22x1.5) (Aliexpress)
Rails :
2x30cm MGN15H avec chariot (Aliexpress)
2x10cm MGN15H avec chariot (Aliexpress)
Axes :
1 x 12x150mm (Aliexpress)
1 x axe custom (Aliexpress)
3 x Vis limite D12 (M10), longueur 40mm (Aliexpress)
Visserie :
| DIN7991 : | DIN912 : | ISO7380 |
| 2 x M8x45 2 x M8x35 8 x M3x12 8 x M3x20 | 12 x M4x20 8 x M6x14 4 x M6x20 | 2 x M5x30 4 x M5x20 |
Ecrou en Té :
12 x M6
M3 pour les rails
2) Paramétrage driver :
- pn024 = 25
- pn62 = 6
3) Câblage :
Le DB25 du driver doit être branché sur le port 5 ou 6 de la Competition Control box. La calibration s’effectue dans le Motion Center :
Sur la Smart Control Box DIY …
Le cinquième moteur est cablé comme suit sur la control box DIY des SRT80.
| Arduino | DB25 | |
| Dir : | D3 | 4 |
| Pulse : | D12 | 3 |
| Enable | A0 | 6 |
| SigOut3 | D13 | 12 |
| 5V | 5V | 9 |
| GND | GND | 5, 10, 14 |
Il faut utiliser le code de calibration.
4) Fichiers 3D
Les fichiers 3D sont disponibles sur cette page.
Si vous ne possédez pas d’imprimante 3D, vous pouvez me les commander ici.
Chaque fichier contient une consigne d’impression sous la forme rxxixx. Le premier nombre est la précision, le second le remplissage. Par exemple r02i30 signifie précision de 0,2 et remplissage à 30%. Il est utile aussi de doubler l’épaisseur des murs.
La mention “support” indique qu’il faut des supports…
Certains fichiers sont des exclusivités réservées aux patrons “PRO” et “ELITE”.
Toutes les pièces sont dans l’orientation idéale pour l’impression.
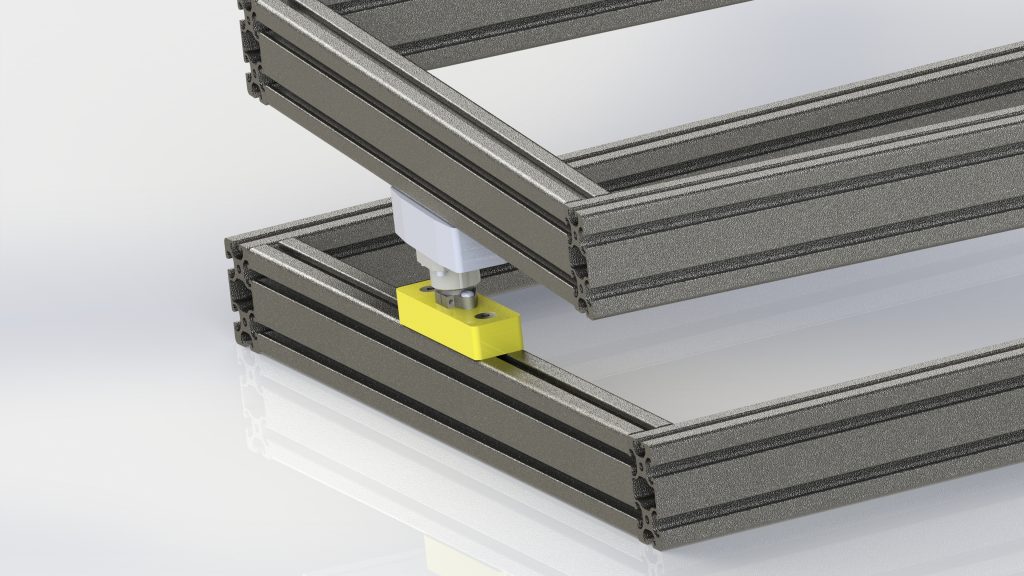
Il faut imprimer une fois la pièces pour le pivot de devant, et deux fois les pièces pour le pivot de derrière.
5) Assemblage
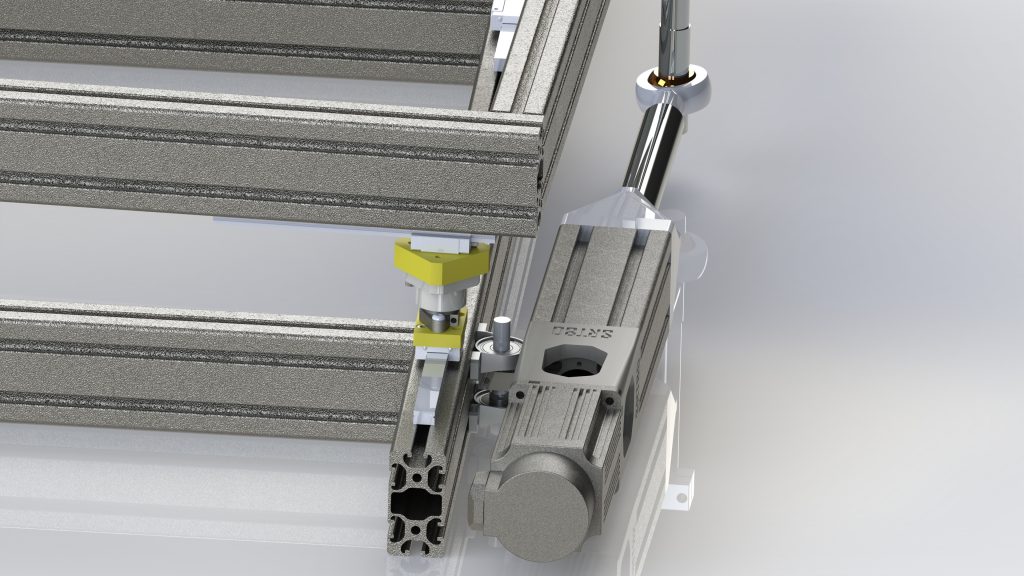
Il est obligatoire d’ajouter des butées physiques ayant les fonctions suivantes :
1) Assurer que le châssis ne sorte pas des rails
2) Jouer le rôle de butée de calibration afin de soulager les impressions du vérin

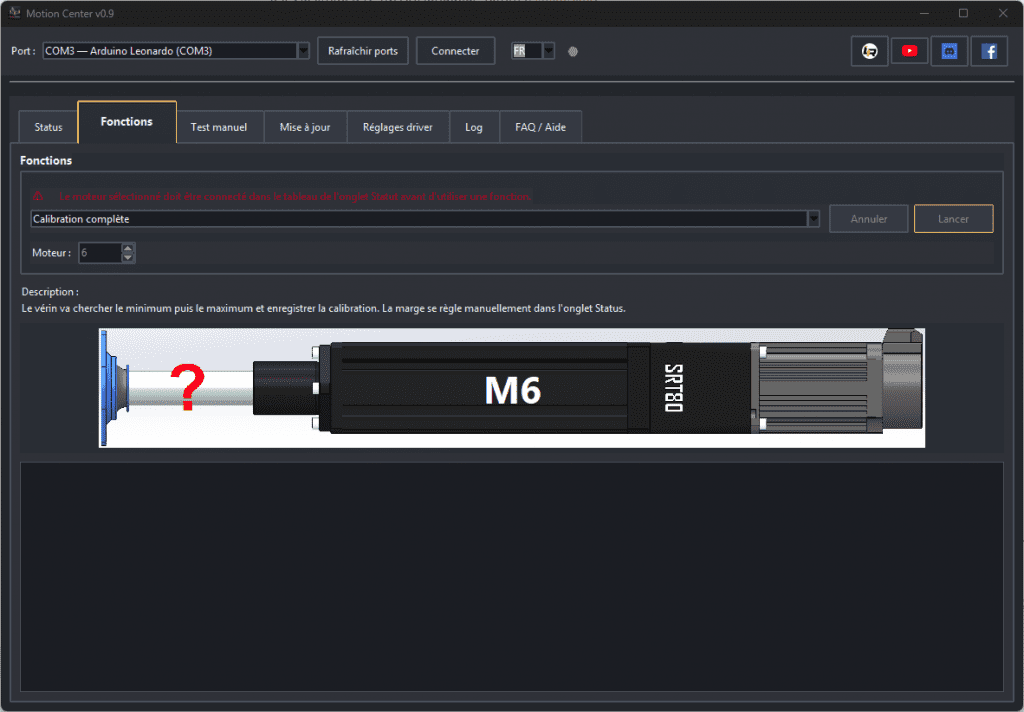
Procédure de calibration (nécessite firmware V1.8 minimum).
Ouvrir le Motion Center, connecter la box, aller dans l’onglet fonctions, sélectionner le moteur utilisé pour le traction loss, et lancer une calibration complète.
Le logiciel vous guidera dans les différentes étapes.
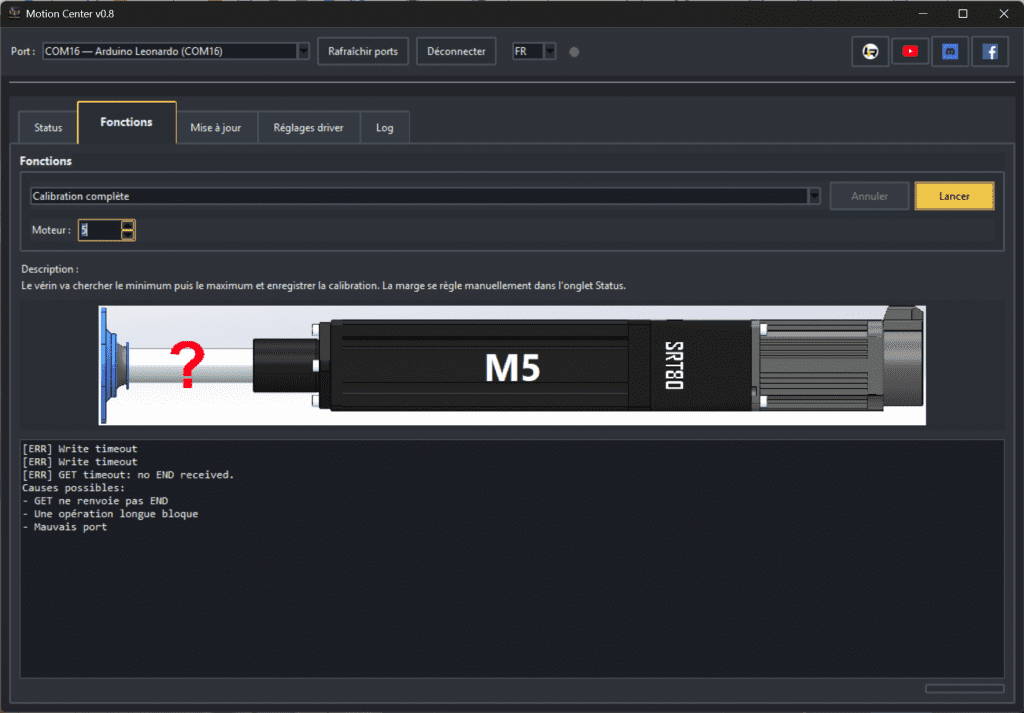
ATTENTION : lorsque le vérin va chercher le minimum, s’il n’y a pas de butée qui limite le mouvement sur le châssis, c’est le support moteur (partie haute) qui va être comprimé, ce n’est pas grave. Par contre, lorsque le vérin va chercher le max, s’il ne rencontre aucun obstacle, il est possible qu’il aille en butée contre le support de roulement linéaire, et le risque de casse est important. La calibration sauvegarde automatiquement les valeurs de calibration trouvées.
Avec Simhub, le vérin ira chercher le min, appliquera la marge, rejoindra le centre et sera ensuite prêt à l’emploi. Simhub ne pourra pas dépasser les marges. Le max est sauvegardé donc le vérin n’a pas besoin d’aller le chercher.

“Decompressing failed. Please add 1 to Pn098, and restart calibration” .Si ce message s’affiche, c’est qu’on dépasse la résolution de l’arduino (de 0 à 65535 pas). Il faut donc augmenter la démultiplication numérique qui est géré par pn098. Par défaut la valeur est 6, on peut passer à 7, 8 ou 9 et refaire le test. Attention : augmenter pn98 augmente mécanique la vitesse. Il ne faut modifier le pn098 que du cinquième vérin. Ne pas toucher au réglage des vérins 1 à 4.
Si vous n’utilisez plus le cinquième vérin, il est conseillé de le désactiver : aller dans l’onglet statut, et déconnecter le vérin.