
Le tensionneur de harnais P1 permet de ressentir les G positifs et/ou négatifs de manière réaliste en sim racing. Il fonctionne avec Simhub.
La V2 permet de gagner en couple grâce à un enrouleur de plus faible diamètre. Le carter est maintenant total pour plus de sécurité.
Sommaire :
- Présentation
- Caractéristiques
- Liste de courses
- Control Box
- Fichiers 3D
- Câblage
- Paramétrage des drivers
- Code Arduino Uno
- Instructions de montage
- Réglages additionnels
1) Présentation
Ce qui étonne c’est l’absence de latence et la force, on ressent même les vibreurs !
Le tensioneur de harnais est constitué d’un harnais (4 ou 5 points), un moteur électrique, un driver de moteur électrique, et une carte arduino reliée à FlyPT ou Simhub.
Le système est précis et réactif , il s’enclenche immédiatement, et on ressent la différence de freinage entre une F1 et une voiture de base, on sent aussi l’activation de l’ABS.
Ce système ne permet peut-être pas de doser le freinage. Pour autant on ressent un lien direct entre la pression appliquée sur la pédale et le serrage de la ceinture.
2) Caractéristiques
Le moteur tire sur un câble qui s’enroule autour d’un enrouleur. Le câble tire la ceinture en arrière, cela donne l’impression d’être projeté en avant.
Il y a un carter qui se monte autour de l’enrouleur par sécurité.
3) Liste de course
Industry&CNC propose un kit (envoi lent, envoi rapide) qui sera prochainement mis à jour:
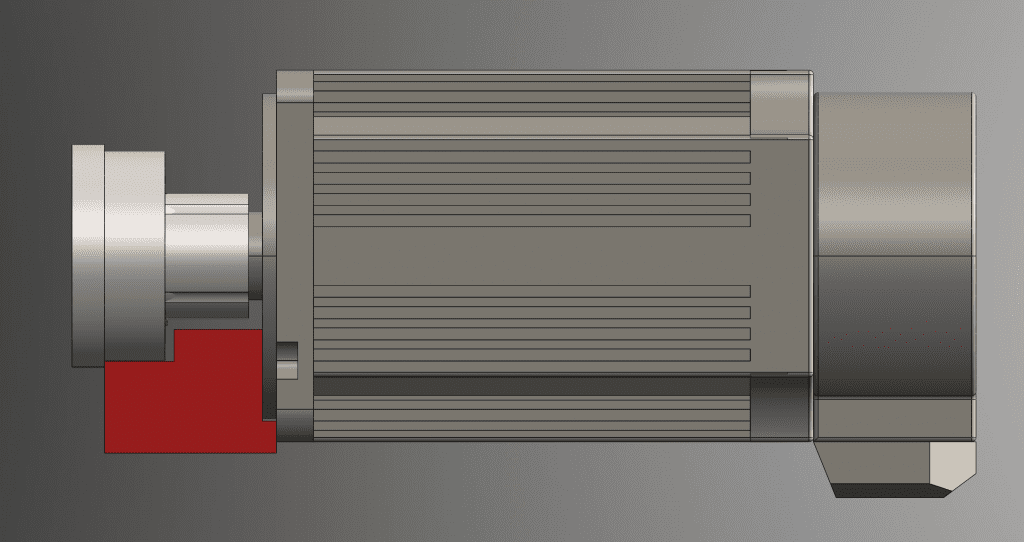
- Un servo moteur 80st-M04025 avec son driver AASD15a
- Un support de moteur 80st
- Un coupleur 19mm
- Un câble de frein de vélo.
NB : les composants ont tous été testés. Je ne serai pas en mesure d’aider si le matériel vient d’ailleurs.
Il reste ensuite à commander :
Electronique :
Voir la liste de course de la control box.
Mécanique :
- Un harnais tensionneur 4 points. (J’ai testé 5 points, mais en tant qu’homme, je n’ai pas trouvé ça agréable, vous voyez ce que je veux dire ?) (Aliexpress).
- 0.5kg de pla pour imprimer les pièces.
Visserie :
- 2 x DIN912 M6x30mm
- 6 x DIN7991 M6x30mm
- 2 x DIN7991 M8x25mm
- 2 x M5x20 sans tête
4) Control Box pour tensioneur de harnais P1
| Smart Control Box Uno (exclusivité Patreon) | G Force Control Box | |
| Carte électronique | Arduino Uno R3 | Processeur custom |
| Logiciel compatible | Simhub | Simhub |
| Caractéristiques | – Réglage Pré-contrainte – Réglage Gain – Switch Power – Switch Accel – Switch frein | – Réglage Pré-contrainte – Réglage Gain – Switch Power – Switch Accel – Switch frein – Ecran déporté – Filtre EMI intégré – Gestion de l’alimentation |
| Documentation complète | Disponible sur le store Lebois Racing |
4) Fichiers 3D
La partie mécanique est disponible sur la page de téléchargement. Les impressions 3D peuvent être commandée sur le store.
Les rouleaux (ce système dépend beaucoup du baquet que vous avez, donc pour le moment, je n’inclue pas les composants dans la liste de course de ce projet). Ce n’est pas une obligation.
5) Cablage
NOTA BENE : Le tensionneur de harnais peut être dangereux. A pleine puissance, il sert énormément autour des clavicules. Il faut donc prévoir un bouton d’arrêt d’urgence.
Effectuer tous les branchements hors tension.
Effectuer tous les tests sans aucune pièce sur l’axe du moteur.
Une fois les tests effectués, et la ceinture installée, effectuer les tests par paliers de 10% de puissance, et en étant toujours en mesure de pouvoir couper le courant.
Difficile de se tromper dans le câblage du moteur. Cette partie est détaillée page 8 et 13 du manuel des drivers.


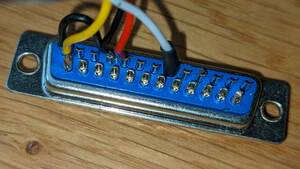
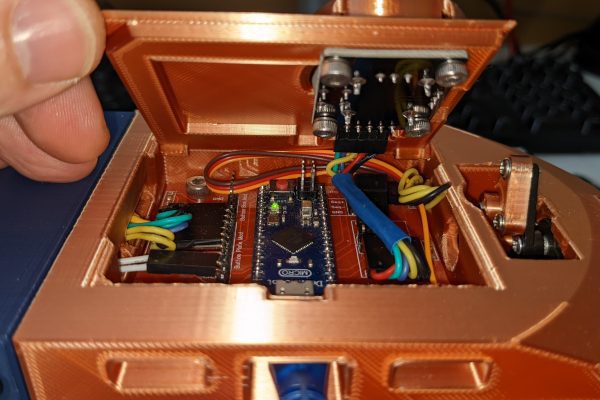
L’arduino est reliée au driver du moteur via le câble 22AWG. La boîte de contrôle renferme l’arduino et un connecteur aviation GX12.
| Arduino | Connecteur DB25 | |
| 5V | 9 | |
| GND (masse) | 10/13 | |
| A0 | 6 | |
| DAC2 | 25 |
6) Paramétrage des drivers :
Les drivers similaires aux AASD possèdent 200 paramétres, heureusement on a pas besoin de tous les modifier.
Le manuel des drivers est disponible ici. Cette vidéo vous montre comment modifier les paramètres
Je recommande fortement de tester le fonctionnement du moteur via flypt ou Simhub avec le moteur démonté !
| Paramètre | Valeur | Explication | Remarque |
| Pn001 | 4 ou 6 | Sélectionne le bon moteur, 4 pour le 80st-M02430, 6 pour le 80st-M04025 | Inutile d’utiliser un moteur plus puissant |
| Pn002 | 0 | Mode de contrôle du moteur | 0 : torque mode : on envoie une commande de force |
| Pn003 | 0 | Active/désactive le driver | 0 : le driver est alumé par l’arduino. 1: le driver est tout le temps allumé |
| Pn188 | 1 | Filtre la commande de force | |
| Pn189 | 30 | Gain : la force du moteur | Vous pourrez augmenter la valeur une fois que l’installation sera parfaitement fonctionnelle. |
| Pn190 | -600 | Offset : permet d’immobiliser le moteur sur la valeur 0. Cette valeur doit être calibrée sur votre installation, ma valeur ne sera peut-être pas la bonne | Ce paramètre permet aussi d’ajouter une petite pré-contrainte. |
| Pn191 | 0 | Permet d’inverser le sens de rotation | 0 : Quand on est face au moteur, sens inverse des aiguilles d’une montre |
Les trois derniers paramètres sont pris en compte par le drivers sans redémarrage.
7) Code Arduino Uno
Pour ajuster la force, vous pouvez agir directement sur le paramètre Pn189.
8) Instructions de montage
1)Pour retirer la clavette de l’axe du moteur, il suffit de visser une vis M3 suffisamment longue, et la clavette part toute seule.
2) Installer le coupleur en le positionnant à l’aide de la calle.
3) Positionner l’équerre, retirer les vis de montage du coupleur, et installer le “drum” à l’aide des deux DIN912 M6x30 et deux DIN7991 M6x30

4) Passer le câble à travers l’attache crochet, puis dans la fente du carter, puis utiliser une des deux DIN912 pour serrer le câble.

5) Installer les deux M5X20
6) Installer le carter à l’aide des DIN7991 M6x30.
7) Installer le tensioneur
9) Réglages additionnels
Une erreur dans les réglages peut entraîner la défaillance du système et donc être dangereux. Tant que vous n’êtes pas habitué, soyez toujours prudent, en mesure de couper le courant ou assisté d’une autre personne.


3 thoughts on “Tensionneur de harnais P1 V2”