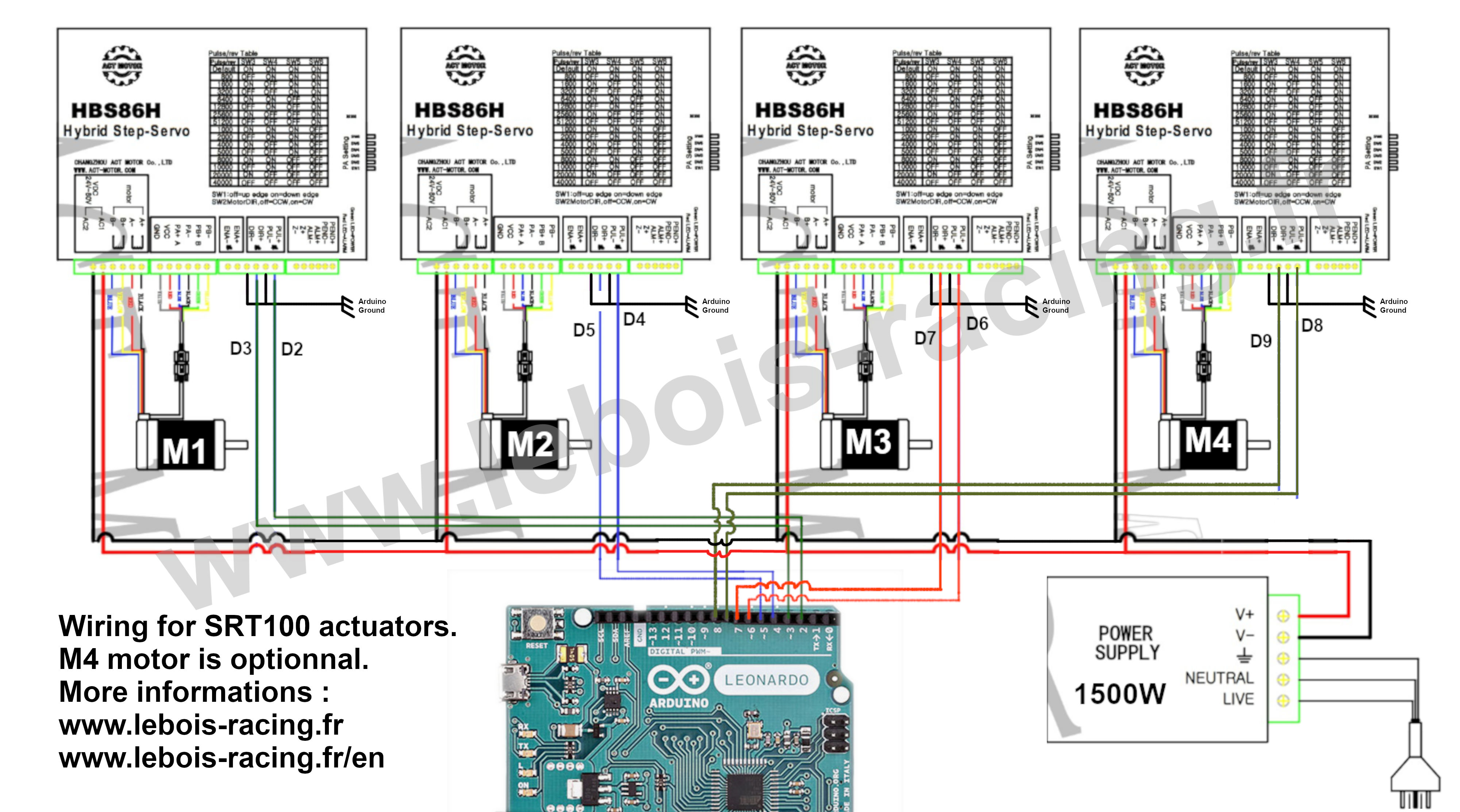
Le câblage est assez simple. Chaque driver est commandé par deux fils : pulse et direction. Lorsque le driver reçoit un signal “pulse”, le moteur va tourner d’un pas. Si vous avez trois vérins au lieu de quatre, il suffit de ne pas câbler le quatrième moteur… Le signal “direction” indique dans quel sens tourner. On a donc besoin de deux fils entre chaque driver et l’Arduino :
Le Salon Discord pour discuter du câblage.
| Driver HBS86H | Arduino Uno |
| Pulse + (M1) | D2 |
| Dir + (M1) | D3 |
| Pulse + (M2) | D4 |
| Dir + (M2) | D5 |
| Pulse + (M3) | D6 |
| Dir + (M3) | D7 |
| Pulse + (M4) (si configuration 4 vérins) | D8 |
| Dir + (M4) (si configuration 4 vérins) | D9 |
Toutes les sorties Pulse – et Dir- sont reliées à la masse de l’Arduino.
Chaque driver est relié à l’alimentation par deux fils. AC1 à +. AC2 à -. ATTENTION LES PINS DES DRIVERS DOIVENT ABSOLUMENT ETRE POSITIONNEE DE LA MANIERE SUIVANTE (pour driver v3) :
| Switchs | Position |
| SW1 | OFF |
| SW2 | OFF |
| SW3 | ON |
| SW4 | ON |
| SW5 | OFF |
| SW6 | OFF |
| SW7 | OFF |
| SW8 | OFF |
Les moteurs sont alimentés par le driver par 4 fils.
| Driver HBS86H | Moteur Nema 34 |
| A+ | Noir |
| A- | Rouge |
| B+ | Jaune |
| B- | Bleu |
Les encodeurs des moteurs permettent de détecter la position des moteurs, position qui est ensuite utilisée par les drivers pour corriger la position si besoin. Chaque encodeur est alimenté par 6 fils.
| Driver | Encodeur |
| PB- | Jaune |
| PB+ | Vert |
| PA- | Noir |
| PA+ | Bleu |
| VCC | Rouge |
| Ground | Gris/blanc |
Voici le schéma de câblage complet. Encore une fois, il faut absolument correctement configurer les pins du driver. Sinon le vérin risque de dépasser la course maximale ou de partir dans le mauvais sens.
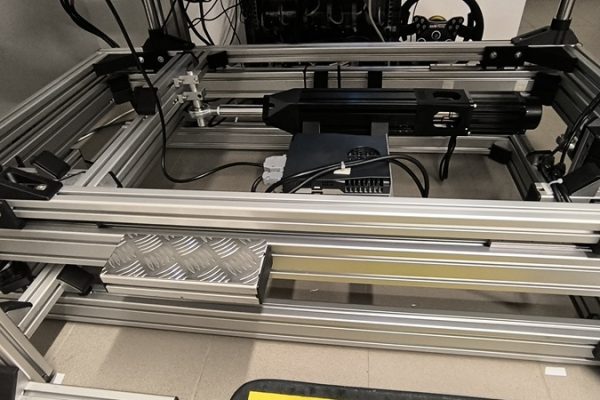
Une fois le câblage finalisé, vous pouvez relier l’Arduino à FlyPT et faire un premier test à vide, c’est-à-dire avec les moteurs non montés.


La dernière photo ne s’affiche plus 😉
Sinon merci pour ton travail je pense que je vais me lancer 🙂
Merci pour ton commentaire, c’est corrigé ! 🙂
le cablage des vérins SRT100 avec l’ARDUINO et HBS68H ? est il compatibles avec des SRT80 ,,,,?
merci !
non rien à voir