Le développement des pédales SRT se poursuit avec toujours les mêmes objectifs : toujours plus fiable, toujours plus réaliste, toujours plus réglable
Envie de soutenir ce projet ? https://www.paypal.me/leboisVR?locale.x=fr
Mise à jour du code
Petit ajout mineur, le code permet maintenant en mode “Verbose” d’afficher le min et la max lu.

Ces deux nombres doivent ensuite être utilisés pour calibrer les pédales via les lignes suivantes :
int minAccelerator = 210;
int maxAccelerator = 595;
int minBrake = 130 ;
int maxBrake = 800;
int minClutch = 130;
int maxClutch = 250;
Une fois la calibration effectuée, pensez à désactiver le mode “Verbose” pour faire fonctionner le code à vitesse normale.
Accélérateur P1 : nouvelle norme
Le développement de l’accélérateur P1 se poursuit…très lentement. Je souhaite cependant vous présenter dès à présent les principes retenus, car ils seront ensuite déclinés pour le frein et l’embrayage.
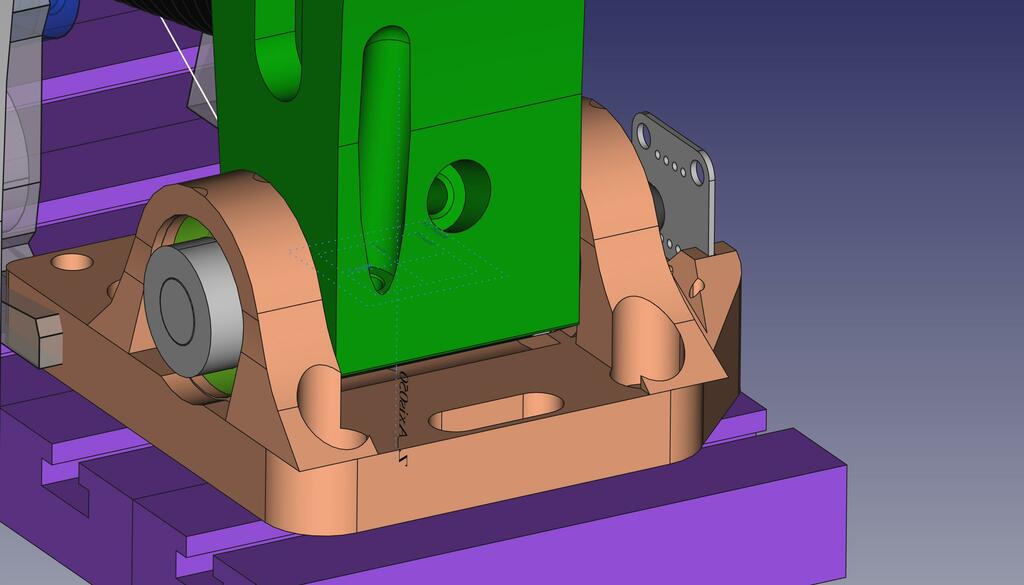
Nouveau principe de fixation.
L’un des derniers problèmes restants avec les pédales SRT est la fixation. La majorité des pédaliers est livrée avec une plaque permettant un montage propre. Pour les SRT, évidemment, c’est plus compliqué, et on se résout généralement à visser les pédales dans une planche en bois. C’est fonctionnel, mais ça fait tâche sur un simulateur haut de gamme.
Aussi je dois remercier Natalucciu du forum Racingfr qui m’a suggéré la solution (allez voir son châssis en profilé Motedis, c’est un bijoux !). On peut tout simplement utiliser des profilés 40×40, 80×40 voir même 160×40.
Evidemment, c’est relativement onéreux. Mais cela permet un montage ultra-rigide, et réglable. Puis ça se trouve à peu près partout. Dans tous les cas, il sera toujours possible de monter les pédales sur une planche en bois.
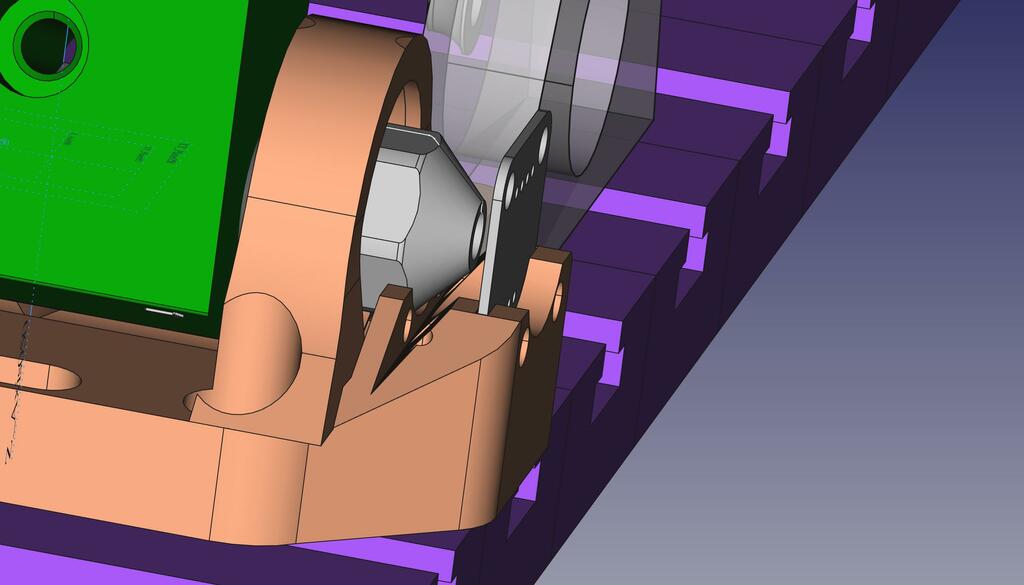
Par conséquent, exit les palliers KP001. Deux roulements seront directement installés dans la base. Cela permet de gagner sur toutes les côtes, et d’optimiser la rigidité (une deux vis des KP001 aurait été trop courte pour fixer le KP001 à la base, l’autre traversant la base pour aller se prendre dans le profilé).
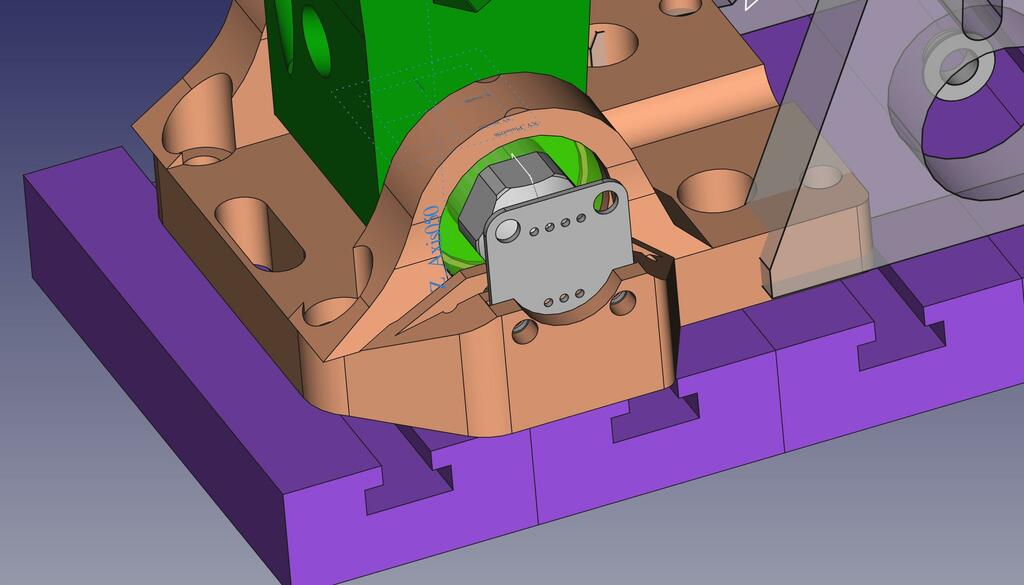
Capteur effet Hall
Côté capteur, l’intégration du capteur à effet Hall avance. On retrouvera la possibilité d’utiliser un axe en métal ou en plastique, à l’extrémité duquel on viendra visser un écrou en plastique qui accueille un aimant.
Réglage à vis
Enfin on retrouve sur le levier les vis de réglages qui sont déjà présentes sur le levier de frein, et qui devraient proposer un réglage fin, et durable.
Date de sortie ?
Pas pour tout de suite !!! Je me concentre actuellement sur la boîte de vitesse, qui est particulièrement chronophage. Par ailleurs, j’avoue être particulièrement satisfait de l’accélérateur GT, ce qui ne me motive pas à développer la nouvelle.
Envie de soutenir ce projet ? https://www.paypal.me/leboisVR?locale.x=fr