Le Surge permet de ressentir les mouvements d’avant en arrière lors d’un freinage et d’une accélération. C’est l’oeuvre de Skyzo-boy que vous pouvez retrouver sur le Discord si vous avez des questions.
Côté Châssis, la liste de course inclut un cadre rectangulaire qui sera fixe, et qui reçoit le vérin SRT80.
Tout changement de géométrie modifie toutes les longueurs des pièces. Par conséquent si vous vous éloignez des dimensions proposées, vous aurez probablement à revoir la longueur de certaines pièces.
1) Liste de course :
Châssis :
Comme toutes les contraintes de poids sont verticales et que le châssis de Surge est pris en sandwich, on peut limiter la hauteur du simulateur en utilisant du profilé alu de 40×40 qui est suffisant cependant pour le consolider, on utilisera 4 équerres 80×40 aux 4 coins. (Le simulateur sera rehaussé d’environ 7cm)
Dimensions châssis : 70cm x 130cm
- 2 x 4040 130cm (cadre)
- 5 x 4040 62cm (cadre)
- 2×4040 20 cm (butés)
- 1×4040 10 cm (renfort fixation axe)
- 22 équerres (40×40)
- 4 équerres (40×80)
Les profilés peuvent être commandés n’importe où, en France, je recommande Motedis.
Vérin :
1 x Vérin (Aliexpress)
Rotules/roulements/rails :
2 x SK20 (Aliexpress)
1 x POS22 (male thread-right, M22x1.5) (Aliexpress)
Rail :
4x35cm MGN15C avec chariot (Aliexpress)
35cm c’est la longueur minimale, mais plus le rail sera long, plus les parallélismes seront garantis. L’idéal étant d’utiliser un rail au lieu de deux.
4 chariots nus MGN15C (Aliexpress)
Chaque rail est équipé de 2 chariots
Axe :
1 x axe custom qui peut être recouper à la bonne longueur (Aliexpress)
2 butés caoutchouc M6x18mm 25x20mm + écrous et rondelles M6 (Aliexpress)
Visserie :
| DIN 7991 : | DIN 7380F : | DIN912 : |
| 32 x M3x16 | 12 x M8x20 | 4 x M6x14 |
Ecrous en Té :
4 x M6
32 x M3 pour les rails
2) Paramétrage driver :
- pn024 = 25
- pn62 = 6
3) Câblage :
Le cinquième ou sixième moteur est câblé comme suit sur la control box des SRT80. Il n’y a rien de particulier à faire avec la Control Box Compétition V2.
| Arduino | DB25 | |
| Dir : | D3 | 4 |
| Pulse : | D12 | 3 |
| Enable | A0 | 6 |
| SigOut3 | D13 | 12 |
| 5V | 5V | 9 |
| GND | GND | 5, 10, 14 |
La calibration s’effectue comme suit : utiliser la calibration automatique dans le motion center.
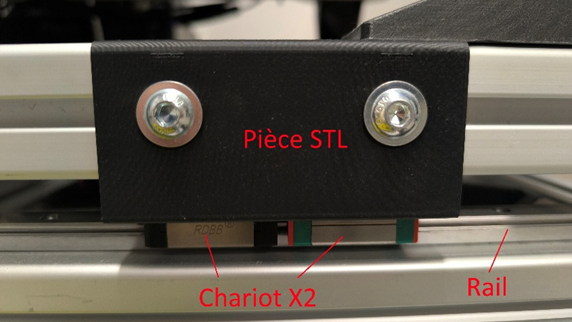
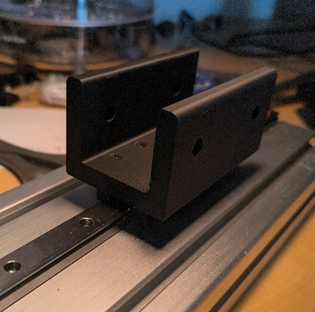
4) Fichiers 3D
Les fichiers 3D sont disponibles sur cette page.
A imprimer en précision 0.2 remplissage 60 à 80% en PLA ou PETG.
Il est utile aussi de doubler l’épaisseur des murs.
Sans supports.
La pièce est dans l’orientation idéale pour l’impression.
Il faut imprimer 4 fois la pièce.
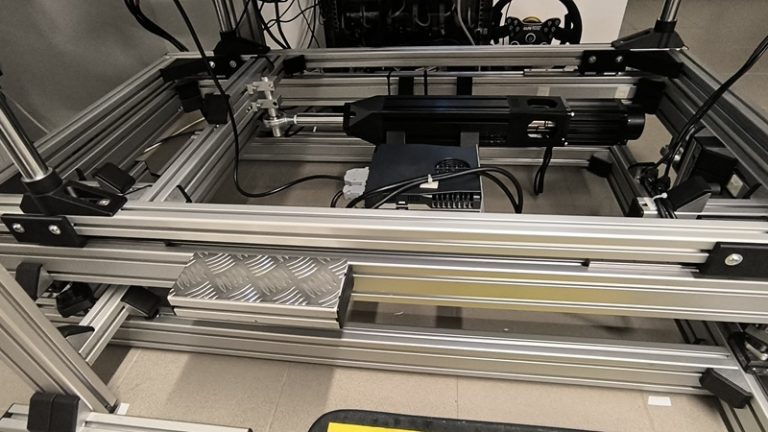
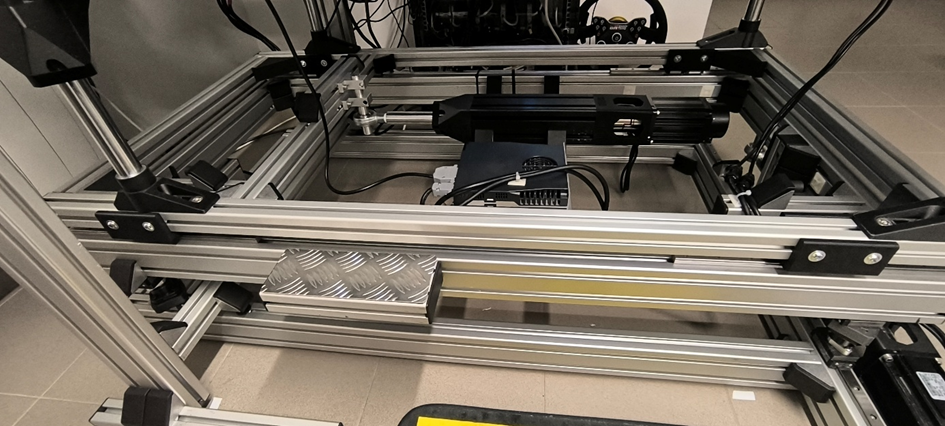
5) Assemblage
Les photos parlent d’elle-même.
Cadre + vérin :
Butées :


Axe :
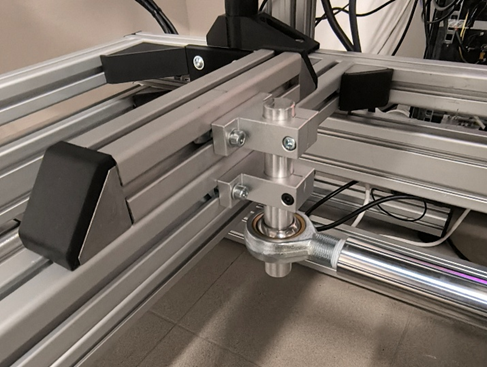
Attention il faut régler les butés avant et arrière pour ne pas forcer sur le vérin.
6) Procédure de calibration.
7) Utilisateurs de Traction-Loss.
Si parallèlement au Surge, vous souhaitez le combiner le traction-loss, alors il est impératif de renforcer le tout en appliquant les 2 modifications suivants :
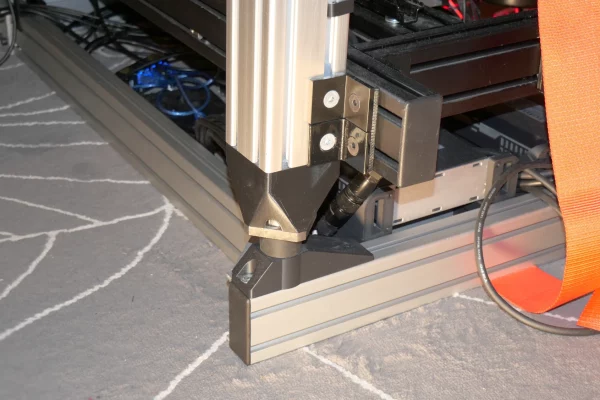
- Ajout de deux pivots avant droite et gauche.

5
- Renfort de l’axe de rotation avant.



Super config! Moi je suis sur simulateur de vol et j’aimerai me faire une plateforme dynamique pour renforcer l’immersion en plus de mon casque VR ( l’heure de vol coûte cher en club et j’aimerais m’entraîner plus à la maison) si on peut échanger sur le sujet ça serait sympa !😉