
Voilà un projet qui me trotte dans la tête depuis longtemps… La V3, c’était il y a trois ans. Entre temps, tout a changé. J’ai eu énormément de retours d’un côté. D’un autre j’ai développé le tensioneur P1 jusqu’à ce que ça devienne un produit professionnel. Ce qui implique que j’ai développé des compétences en électronique qui n’ont rien à voir avec celles dont je disposais “à l’époque”.
Fort de tous les retours que j’ai pu avoir, il est temps de s’attaquer à cette V4.
En effet, la V3 a causé du fil à retordre à plus d’un ! La V3 patit de plusieurs faiblesses :
1) Un moteur très puissant, mais qui consomme par conséquent beaucoup de courant, et a tendance à faire cramer les drivers et alim : Effectivement à l’époque, j’étais parti sur un “qui peut le plus peu le moins”, et j’avais choisi un moteur 300W. Puissant, réactif. Mais trop demandeur. En parallèle de ça, les drivers disponibles sont rapidement limités, malgré que leur fiche technique affiche régulièrement des puissances ahurissantes (voir d’ailleurs l’excellente étude de jmr31 que je salue !)

2) Un projet (trop) DIY
En dehors de ce problème de consommation électrique, le projet dans sa globalité nécessite une compréhension globable importante. Ce n’est pas réellement un défaut : c’est du DIY. Et le DIY, ça n’implique pas uniquement de faire soi-même, cela implique aussi de comprendre ce que l’on fait. Parce que les documentations ne seront jamais complètes à 100%, parce que les composants livrés varient toujours d’un batch à un autre. En l’occurence, il fallait modifier le pcb pour se brancher sur une piste qui accepte du PWM. Vous ne comprenez pas cette phrase ? Et bien vous auriez eu du mal à réaliser ce tensioneur.
3) Une interface Simhub trop complexe
A cet époque, on utilisait le module pour contrôler les ventilateurs et autres moteurs. Même si en thoérie, on arrive à ses fins, le module est lourd, et offre trop peu de possibilités.
D’un autre côté le tensioneur P1 a ses défauts :
- Vous êtes nombreux à vous plaindre du prix. Là dessus il n’y a pas grand chose à faire. C’est du matériel industriel… avec des pcbs (pour la Gforce) qui sont très complexes et longs à produire.
- Le moteur génère des interférences qui ne sont pas évidentes à régler, notamment lorsqu’on utilise la control box DIY.
- Le driver du moteur est volumineux et on se retrouve avec beaucoup de câbles, pas forcément facile à intégrer.
Comment le tensioneur GT V4 peut pallier à ces problèmes :
La base, ça sera un moteur DC avec une démultiplication. Le moteur consomme peu de courant, tout en conservant une force honorable. L’inconvénient, c’est qu’on perd en vitesse (mais on en a pas besoin), et potentiellement le mécanisme sera moins fluide/plus bruyant. Mais pour avoir testé un système commercial concurent qui utilise cette solution, ce n’est pas vraiment problématique.

En parallèle, je pense concevoir mon propre PCB pour le driver. Prévoir quelque chose de surdimensioné, et avec les ports pertinents dans le cadre de notre utilisation. Je n’ai pas encore déterminé les limites de ce PCB. Est-ce que je propose un pcb qui embarque absolument tout (processeur, port hdmi pour écran déporté…) qui sera très cher, ou est-ce que je propose un PCB minimaliste (uniquement la partie puissance), et ensuite on a le choix entre brancher la Gforce ou une arduino simple (Smart Control Box).
Dans tous les cas je souhaite que le GT et le P1 puissent partager la même unité de contrôle, et la même intégration sur Simhub.
Le délais
Pour le moment j’ai juste le moteur que j’ai pu brancher sur une alimentation pour me rendre compte de la puissance et de la vitesse. Le gros du travail, ce sera le PCB et la plasturgie.
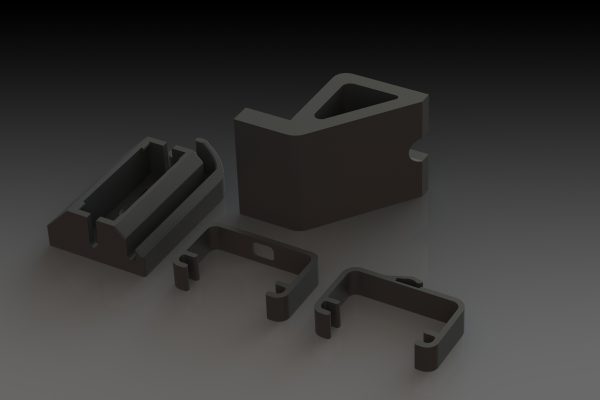
En parlant de plasturgie…. Je suis un peu hésitant aussi. La logique depuis quelques temps, c’est de faire cohabiter une version DIY et une version PRO. La version PRO de mes projets utilisent beaucoup moins d’impressions 3D. J’hésite à proposer d’emblée une version DIY avec des pièces en métal, même si cela augmente le prix… En l’occurence (y’a plein de fois occurence aujourd’hui), je vais concevoir une équerre pour le moteur sur mesure, fabriquée ici dans notre beau pays par découpe laser et pliage. En effet, la fixation des tensioneurs GT et PRO, ça a toujours été problématique vu que les équerres qu’on peut trouver ne sont jamais compatibles avec nos profilés alu.
D’ailleurs, il y a une grosse nouveauté qui arrive pour tout ceux qui cherchent des rouleaux pour passer le harnais dans le baquet sans frottement 🙂
Encore merci à tous les contributeurs patreon qui me soutiennent et me motivent à toujours pousser le DIY plus loin !


j ai tout le matériel pour réaliser le tensionneur de harnais gt v3
Je viens de voir un nouveau message en rouge sur ton site qui dit “MOD DECONSEILLE PAR MANQUE DE FIABILITE. NE LE REALISER QUE SI VOUS AVEZ DES COMPETENCES EN ELECTRONIQUES POUR ANALYSER LES COMPOSANTS. Vous pouvez faire le P1 ou attendre la V4 qui sera basée sur un autre principe.”
Est ce que je dois me lancer maintenant que j’ai tout malgré le message ou est ce que je dois attendre la v4 en espérant ne pas devoir tout racheter
LeboisVR si tu peux me donner ton avis
tu devras tout racheter :/
Si tu veux te lancer dans le V3 : prends une alimentation 600W et ne dépasse pas 50% de la puissance max et ça ira
merci pour ta réponse