
Le tensionneur de harnais P1 permet de ressentir les G positifs et/ou négatifs de manière réaliste en sim racing. Il fonctionne avec Simhub ou FlyPT.
Sommaire :
- Présentation
- Caractéristiques
- Liste de courses
- Control Box
- Fichiers 3D
- Câblage
- Paramétrage des drivers
- Code Arduino Due et profil FlyPT
- Instructions de montage
- Réglages additionnels
1) Présentation
Ce qui étonne c’est l’absence de latence et la force, on ressent même les vibreurs !
Le tensioneur de harnais est constitué d’un harnais (4 ou 5 points), un moteur électrique, un driver de moteur électrique, et une carte arduino reliée à FlyPT.
Le système est précis et réactif , il s’enclenche immédiatement, et on ressent la différence de freinage entre une F1 et une voiture de base, on sent aussi l’activation de l’ABS.
Ce système ne permet peut-être pas de doser le freinage. Pour autant on ressent un lien direct entre la pression appliquée sur la pédale et le serrage de la ceinture.
2) Caractéristiques
Le moteur tire sur un câble qui s’enroule autour d’un enrouleur. Le câble tire la ceinture en arrière, cela donne l’impression d’être projeté en avant.
Il y a un carter qui se monte autour de l’enrouleur par sécurité.
3) Liste de course
Industry&CNC propose un kit (envoi lent, envoi rapide) comportant :
- Un servo moteur 80st-M02430 avec son driver AASD15a
- Un support de moteur 80st
- Connecteur GX12 4 pin
- Câble 4 fils, 22AWG
- Un coupleur 19mm
- Un câble de frein de vélo.
NB : les composants ont tous été testés. Je ne serai pas en mesure d’aider si le matériel vient d’ailleurs.
Il reste ensuite à commander :
Electronique :
- Carte Arduino Due (Amazon, je n’ai pas encore testé de clône).
Mécanique :
- Un harnais tensionneur 4 points. (J’ai testé 5 points, mais en tant qu’homme, je n’ai pas trouvé ça agréable, vous voyez ce que je veux dire ?) (Aliexpress).
- 0.1kg de pla pour imprimer l’enrouleur.
Visserie :
- 4 x DIN912 M3x5mm
- 4 x DIN912 M6x20mm avec écrous
- 2 x DIN912 M6x25mm
- 2 x DIN7991 M6x25mm
- 1 x DIN7991 M5x40mm
- 2 x DIN7991 M8x30mm
4) Control Box
| Standard Control Box Due | Smart Control Box Due (exclusivité Patreon) | Smart Control Box Uno (exclusivité Patreon) | G Force Control Box |
| Arduino Due | Arduino Due | Arduino Uno R3 | PCB Custom |
| FlyPT | FlyPT | Simhub | Simhub |
| – Réglage Pré-contrainte – Réglage Gain – Switch Power – Switch Accel – Switch frein | – Réglage Pré-contrainte – Réglage Gain – Switch Power – Switch Accel – Switch frein | – la liste est longue, mieux vaut lire directement la doc : | |
| Fichiers 3D | Documentation complète | Documentation complète | Documentation complète |
4) Fichiers 3D
La partie principale est disponible sur la page de téléchargement. Les impressions 3D peuvent être commandée sur le shop Etsy.
Les rouleaux (ce système dépend beaucoup du baquet que vous avez, donc pour le moment, je n’inclue pas les composants dans la liste de course de ce projet).
5) Cablage
NOTA BENE : Le tensionneur de harnais peut être dangereux. A pleine puissance, il sert énormément autour des clavicules. Il faut donc prévoir un bouton d’arrêt d’urgence.
Effectuer tous les branchements hors tension.
Effectuer tous les tests sans aucune pièce sur l’axe du moteur.
Une fois les tests effectués, et la ceinture installée, effectuer les tests par paliers de 10% de puissance, et en étant toujours en mesure de pouvoir couper le courant.
Difficile de se tromper dans le câblage du moteur. Cette partie est détaillée page 8 et 13 du manuel des drivers.

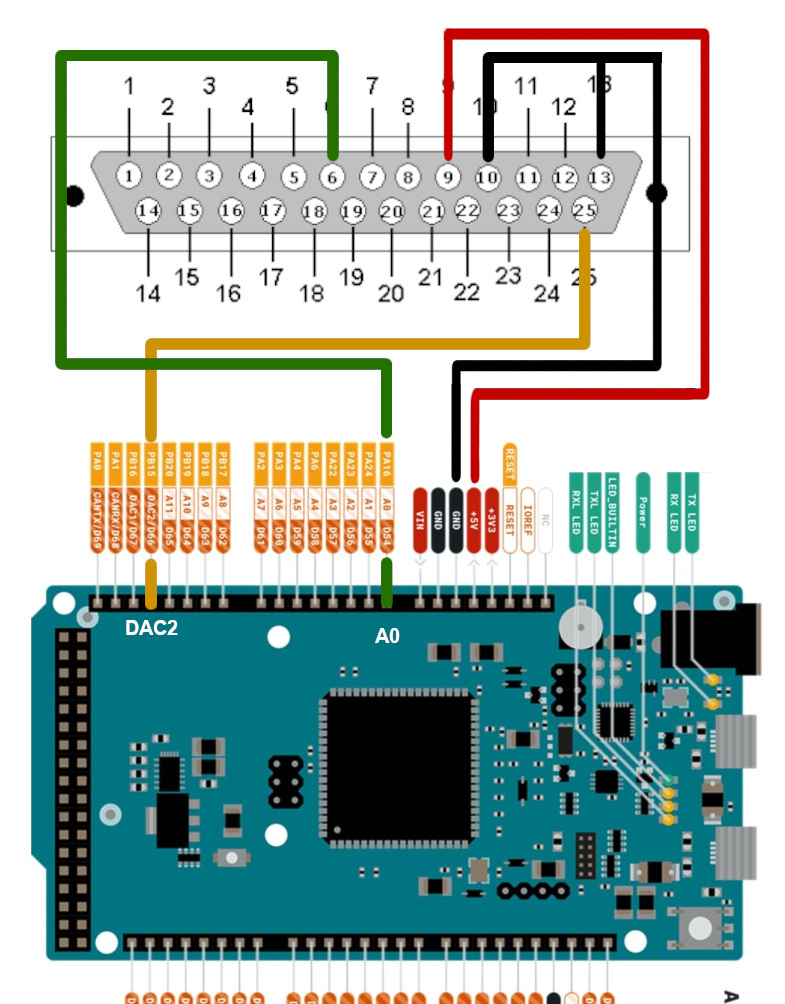
L’arduino est reliée au driver du moteur via le câble 22AWG. La boîte de contrôle renferme l’arduino et un connecteur aviation GX12.
| Arduino | Connecteur DB25 | |
| 5V | 9 | |
| GND (masse) | 10/13 | |
| A0 | 6 | |
| DAC2 | 25 |
6) Paramétrage des drivers :
Les drivers similaires aux AASD possèdent 200 paramétres, heureusement on a pas besoin de tous les modifier.
Le manuel des drivers est disponible ici. Cette vidéo vous montre comment modifier les paramètres
Je recommande fortement de tester le fonctionnement du moteur via flypt avec le moteur démonté !
| Paramètre | Valeur | Explication | Remarque |
| Pn001 | 4 | Sélectionne le bon moteur, en l’occurence un 80st-M02430 | Inutile d’utiliser un moteur plus puissant |
| Pn002 | 0 | Mode de contrôle du moteur | 0 : torque mode : on envoie une commande de force |
| Pn003 | 0 | Active/désactive le driver | 0 : le driver est alumé par l’arduino. 1: le driver est tout le temps allumé |
| Pn189 | 30 | Gain : la force du moteur | Vous pourrez augmenter la valeur une fois que l’installation sera parfaitement fonctionnelle. |
| Pn190 | -600 | Offset : permet d’immobiliser le moteur sur la valeur 0. Cette valeur doit être calibrée sur votre installation, ma valeur ne sera peut-être pas la bonne | Ce paramètre permet aussi d’ajouter une petite pré-contrainte. |
| Pn191 | 0 | Permet d’inverser le sens de rotation | 0 : Quand on est face au moteur, sens inverse des aiguilles d’une montre |
Les trois derniers paramètres sont pris en compte par le drivers sans redémarrage.
7) Code Arduino Due et profil FlyPT
Vous aurez besoin d’ajouter la librairie pour gérer l’Arduino due : Outils > Type de carte > Gestionnaire de carte > tapez Due dans la barre de recherche et installer le paquet “Arduino SAM Boards”. Puis redémarrez l’IDE.

Avant d’utiliser le tensionneur, il faut calibrer l’offset (Pn190). Flasher ce code test en sélectionnant Arduino Due (Native USB port) : le driver doit normalement être actif (il émet un très léger bruit aigue). Si le moteur tourne tout seul, modifiez le paramètre Pn190 jusqu’à ce que le moteur ne tourne plus (chez moi, je suis à -1600).
Vous pouvez maintenant flasher le code définitif disponible ici, toujours en sélectionnant Arduino Due (Native USB port).
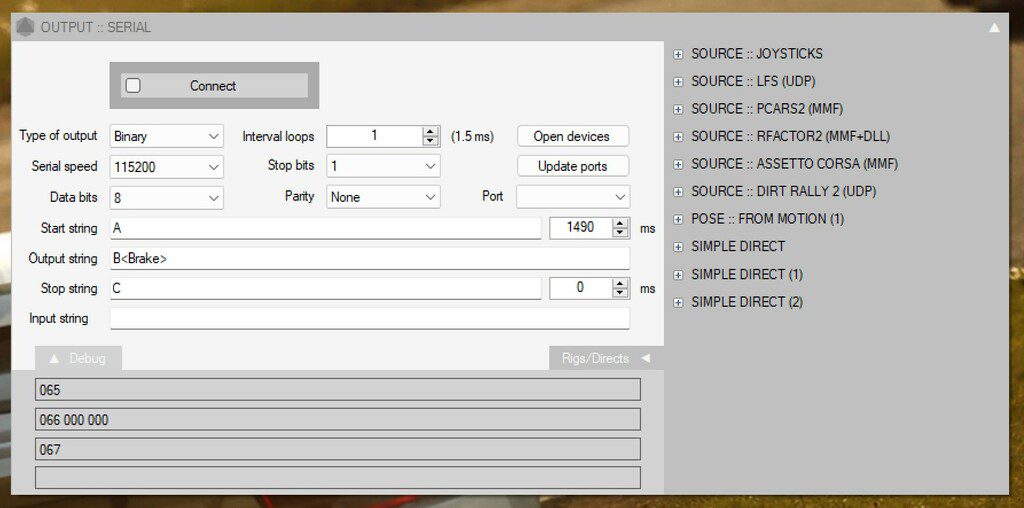
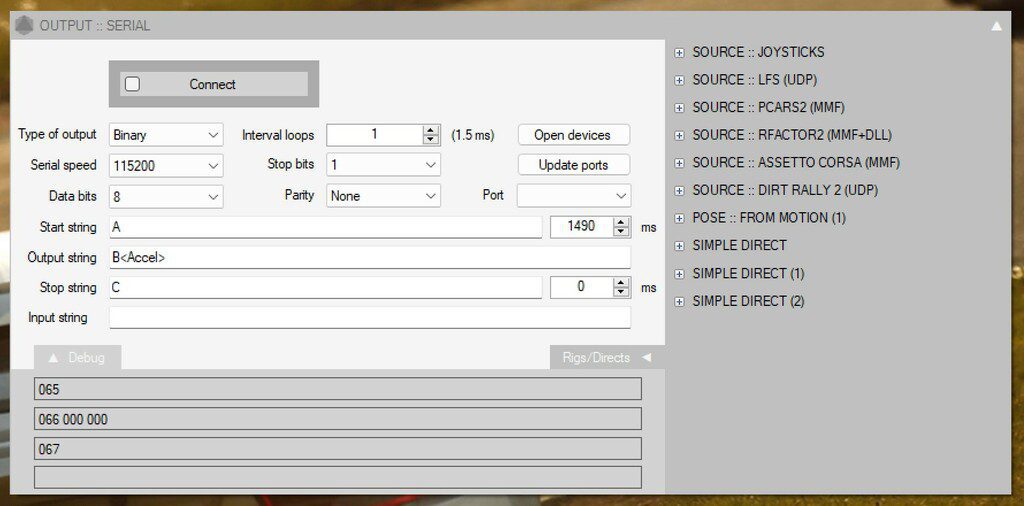
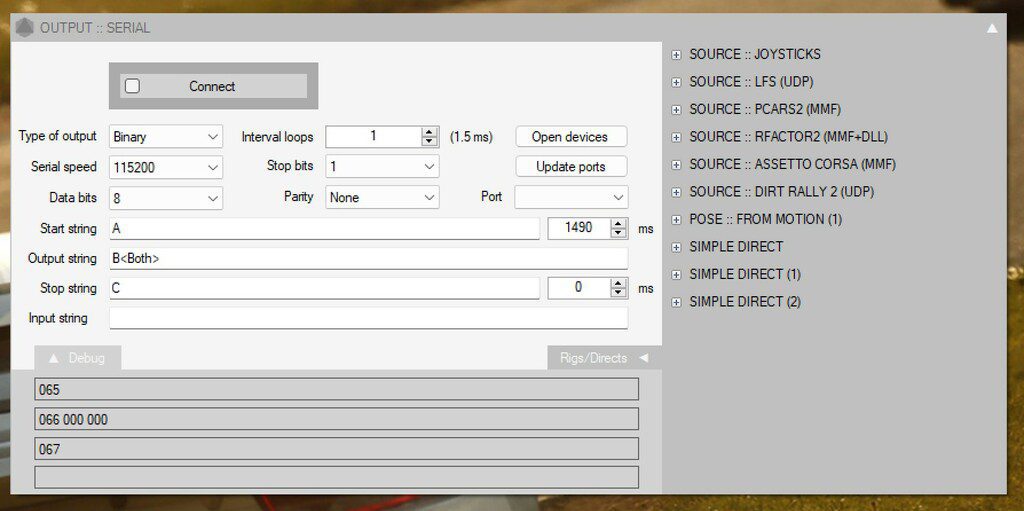
Ouvrez le profil FlyPT. Cliquez sur Output::Serial > Update Ports, puis sélectionnez le port de l’Arduino. Cliquez sur “connect” pour connecter l’Arduino.
Ensuite si aucune source n’est connectée, vous pouvez agir directement sur le slider dans “Simple Direct” pour tester le tensionneur.
Une fois que tout est en place, cliquez sur n’importe quelle source, et connectez-la. Pour certaines sources, il faut faire des modifications du jeu. Plus de détails sur le site de FlyPT.
Pour ajuster la force, vous pouvez agir directement sur le paramètre Pn189.
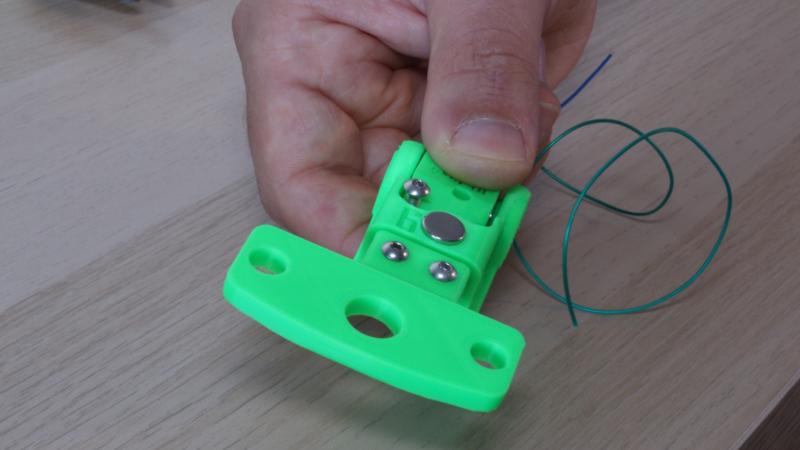
8) Instructions de montage
Vous trouverez le fichier Step sur Thingiverse. Edit : pour retirer la clavette de l’axe du moteur, il suffit de visser une vis M3, et la clavette part toute seule.
9) Réglages additionnels
Une erreur dans les réglages peut entraîner la défaillance du système et donc être dangereux. Tant que vous n’êtes pas habitué, soyez toujours prudent, en mesure de couper le courant ou assisté d’une autre personne.
Il y a trois “simple direct”: Accel, Brake, Both. Selon ce que vous voulez choisir, modifiez le code dans le champ “ouput string” de la fenêtre connect :
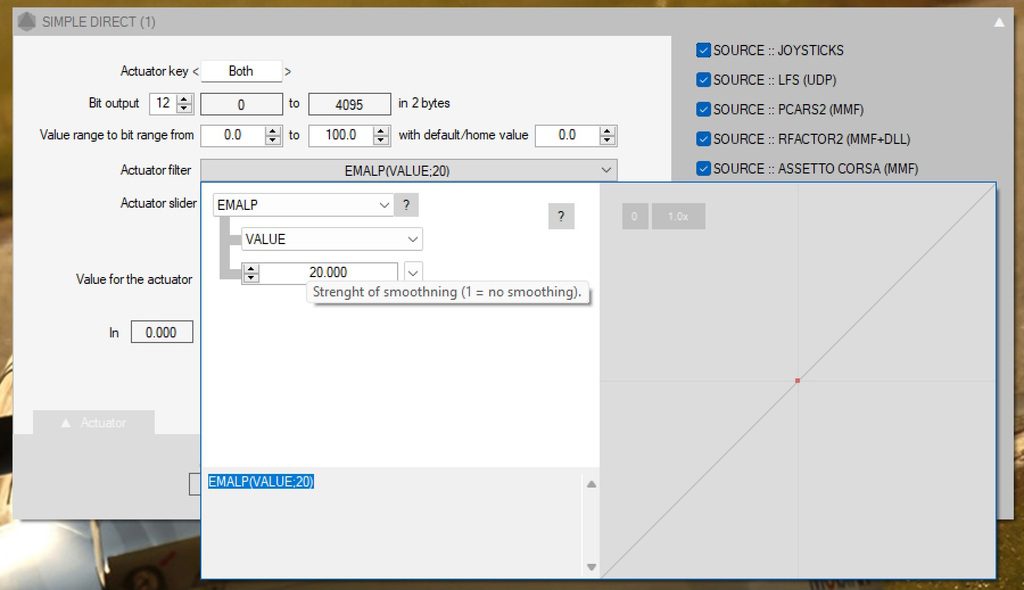
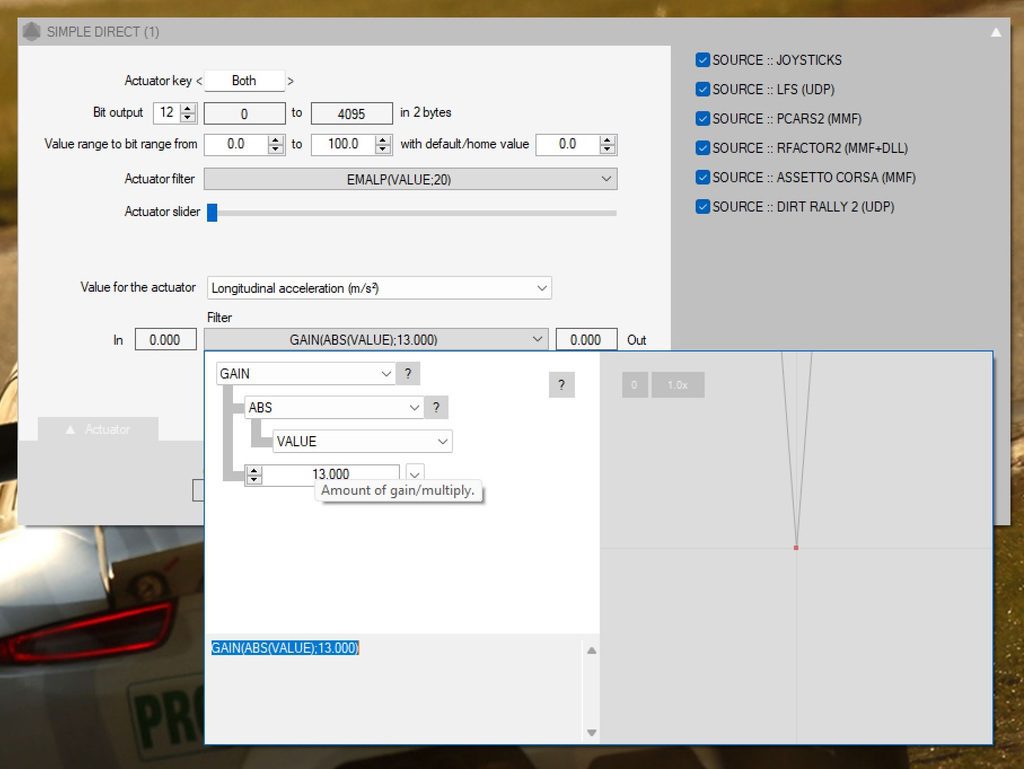
Dans chaque “simple direct”, vous pouvez ajuster le gain, et le filtrage :
Plus la valeur de Emalp est élevée, plus c’est fluide (ça gomme les détails). Je recommande des valeurs entre 10 et 100.
Plus le gain est élevé, plus le tensioneur sert fort. Je recommande évidemment de commencer avec un gain faible. Valeur recommandée : entre 10 et 20.
Merci, très intéressant, tu fais avancer la science 🙂
je pense que je vais tenter ce projet!
Je me posai la question:
Si on mettait 2 tensionneurs: un pour la ceinture droite et un pour la gauche,
et que en virage à gauche, on serrait la ceinture droite, est-ce que le corps aurait l’impression de prendre un G latéral??
possible oui
Bonjour Lebois,
j’ai cliqué sur le lien pour commander ce tensionneur (j’ai déjà la version GT) mais sur les 2 liens, les dates de livraison sont au 17 decembre….Pas de différence donc dans les délais mais bien dans les prix 😉
oui il ne faut pas en tenir compte. En fait Aliexpress ne gère pas l’envoi par train, donc c’est “envoi par le vendeur” et c’est une estimation par défaut.
Super tuto !
Juste sur le site AliExpress, ce serait mieux de mettre des photos avec les pièces imprimées barrées de rouge, sinon on pourrait croire que c’est un kit complet (je sais que c’est précisé dans la description mais bon…)
Bonne idée 🙂
Salut Lebois,
très beau boulot (je parle de l’œuvre complète de l’artiste, pas seulement de ce projet spécifique 😉)
Quelle différence entre ce projet : “Tensionneur de harnais P1” et le “Tensionneur de harnais GT v3.0” ?
pourquoi choisir l’un ou l’autre ?
Merci 👍
Merci pour ton message. Le P1 est basé sur un moteur industriel : indesctructible.
Le GT est basé sur un moteur de scooter donc c’est moins fiable.
Bonjour Mr Lebois, petite question sur le kit P1 vendu sur Aliexpress.
Est ce que le kit est plug and play, une fois les réglages sur SImhub défini?
Merci d avance pour les réponses.
Super boulot que vous faites, je vous le signale au passage, et merci pour cet intérêt aux partages et au développement de notre sport.
il doit manquer l’arduino les impressions 3D et un peu de câblage
Re. 🙂
message laissé sur ton MP Messenger Facebook.
impossible de t’envoyer un message via Discord.
pour achat système complet
merci a toi.
Olivier