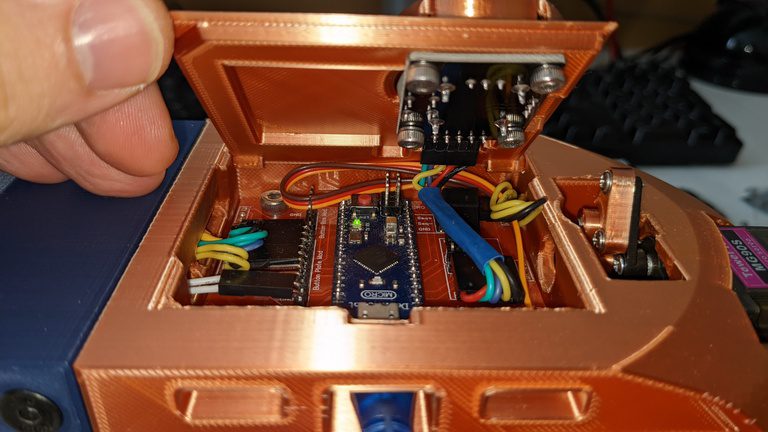
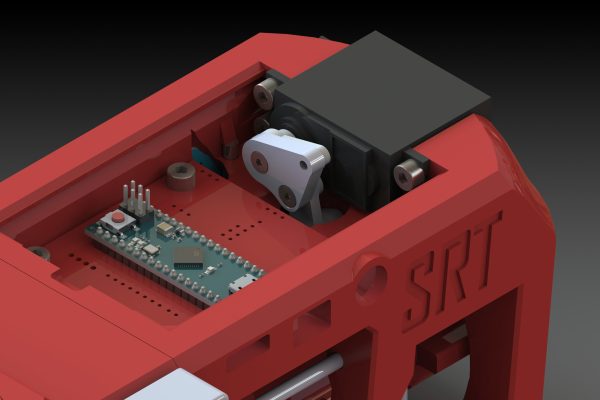
Le mod eClutch permet à la boîte de vitesse de se bloquer lorsque la pédale d’embrayage n’est pas enfoncée. C’est un petit servo moteur qui réalise l’opération, contrôlé via l’Arduino via Simhub.
Le servo est alimenté par une alimentation externe.
Sur la Button Plate, la fonction 13 permet d’activer et de désactiver le blocage de la boîte.
Sommaire
1) Liste de course (V9.0 uniquement)
- Un servo moteur MG996r(Amazon, Aliexpress)
- Alimentation 6V 2A (Amazon, Aliexpress)
- Connecteur DC 5.5mm (Amazon, Aliexpress)
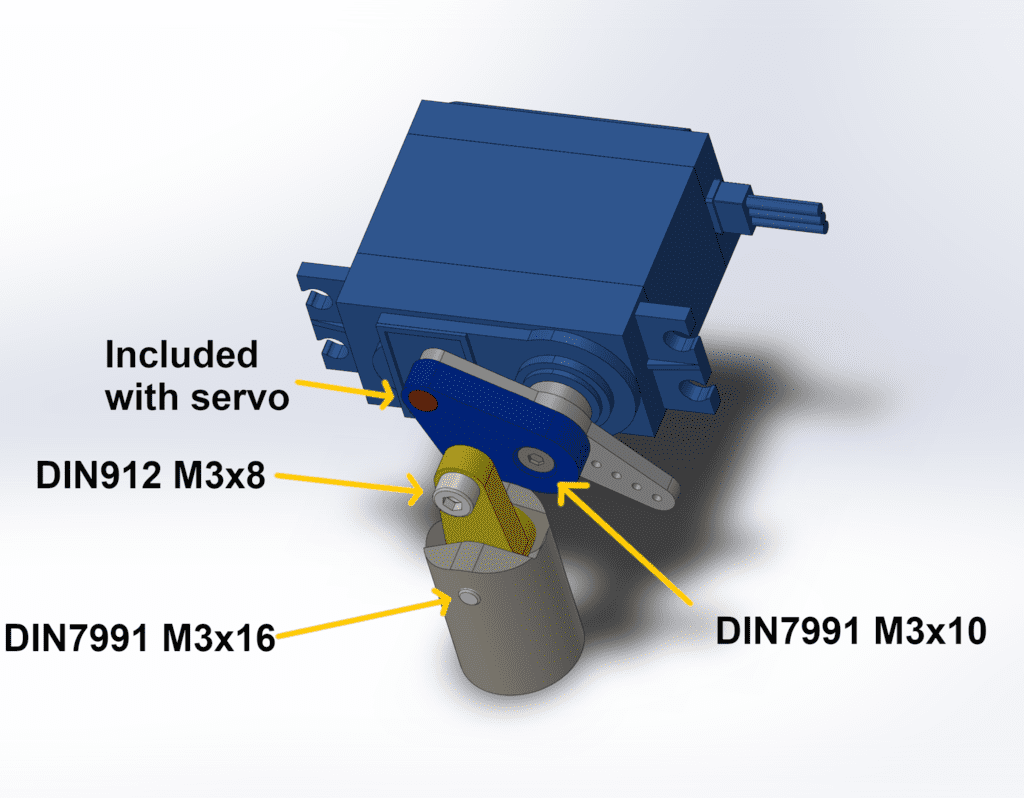
- DIN912 : 2 x M3x10
- DIN912 : 4 x M4x10
- DIN7991 : M3x8
- DIN7991 : M3x16
- Fil (déjà présent dans la liste de course)
2) Montage
Pour le montage, veuillez respecter l’ordre suivant :
- Le connecteur DC se monte sur le body à côté de la sortie USB
- Brancher le servo moteur à l’Arduino
- activer le mod dans le code
- connecter l’Arduino à Simhub
- lancer une partie et attendre que l’embrayage soit en position bloqué (vous pouvez appuyer sur l’embrayage et vérifier que le moteur répond bien)
- installer tout le mécanisme sur le servo alors qu’il est en position bloqué, en veillant à ce que la boîte soit bien bloquée dans cette position.
Vous pouvez ensuite ajuste la position du plongeur lorsqu’il est en position bloqué en modifiant la variable :
#define LOCKED 130
Plus le nombre est élevé, plus le plongeur descend bas. Assurez vous que la position soit correcte afin que le servo ne force pas.
Si le servo force (il fait tout le temps du bruit), il va chauffer et peut se détériorer.
3) Câblage
Le PCB de la V9 ne prévoit pas a priori de port spécifique pour le servo moteur, mais il peut être branché sur le port du frein à main :
Fil jaune : données
L’alimentation du servo se fait par l’alimentation externe (rouge +, marron -). La masse du servo doit aussi être branchée au PCB).
4) Les fichiers 3D
Les fichiers sont sur le google Drive dans le dossier “Mod eClutch”.
5) Le code
Avant d’activer la fonction dans le code, il est conseillé de tester le bon fonctionnement du servo. Pour cela on va utiliser le code d’exemple fourni avec le logiciel Arduino. Une fois l’IDE lancé, allez dans “Fichier>Exemples>Servo>Sweep”. Avant de flasher le code, il faut modifier la ligne suivante :

Le mod nécessite au moins le code 3.0.
Pour activer l’eClutch, il suffit de remplacer :
//#define SRTeCLUTCH
par :
#define SRTeCLUTCH
Vous pouvez ensuite sélectionner le pin sur lequel vous souhaitez brancher le servo. Par défaut, il est branché sur le pin A3 (frein à main).
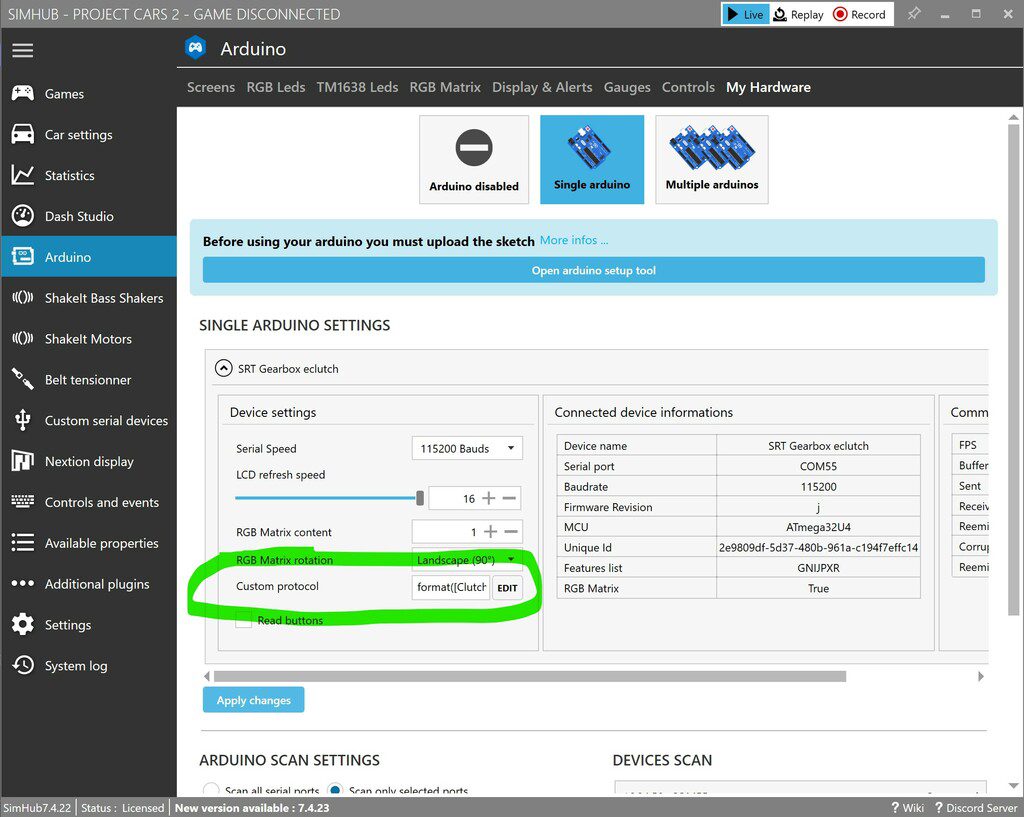
6) Dans Simhub
Dans Simhub, une fois l’arduino connectée, il faut entrer la ligne de code suivante dans le champ “Custom Protocol”:
format([Clutch],0)+';'+format([DataCorePlugin.GameRunning],0)+';'

3 thoughts on “Mod SRT eClutch pour la boîte de vitesse SRT V9.0”