MOD DECONSEILLE PAR MANQUE DE FIABILITE. NE LE REALISER QUE SI VOUS AVEZ DES COMPETENCES EN ELECTRONIQUES POUR ANALYSER LES COMPOSANTS. Vous pouvez faire le P1 ou attendre la V4 qui sera basée sur un autre principe.
Le tensionneur de harnais permet pour un budget limité (moins de 150€) de faire ressentir les G négatifs de manière crédible en sim racin (freinage, ABS, passage de vitesse). Il fonctionne avec Simhub.
Envie de me soutenir ? https://www.paypal.me/leboisVR?locale.x=fr
Sommaire :
1) Présentation
Le tensioneur de harnais est constitué d’un harnais (4 ou 5 points), un moteur électrique, un driver de moteur électrique, et une carte arduino reliée à Simhub.
Rendu final : franchement très sympa. Honnêtement les premiers freinages, on se dit “mouais bof, ça valait peut-être pas la peine de se prendre la tête comme ça…”. Au bout de quelques tours on l’oublie. Puis c’est quand la ceinture ne fonctionne plus (oui parce qu’au début, il y a eu des essais…infructueux ^^) qu’on se rend compte qu’on ne peut plus s’en passer… l’absence de tensioneur donne à nouveau la sensation de jouer à un jeu vidéo, et non de piloter une voiture de course…
Le système est précis et réactif , il s’enclenche immédiatement, et on ressent la différence de freinage entre une F1 et une voiture de base, on sent aussi l’activation de l’ABS.
Ce système ne permet peut-être pas de doser le freinage. Pour autant on ressent un lien direct entre la pression appliquée sur la pédale et le serrage de la ceinture.
Les fichiers 3D sont disponibles sur la page de téléchargement.
2) Caractéristiques
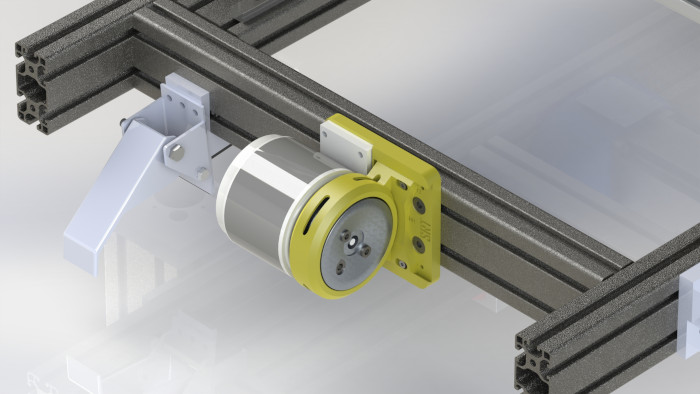
Le moteur tire sur un câble qui s’enroule autour d’un enrouleur. Le câble tire la ceinture en arrière, cela donne l’impression d’être projeté en avant, surtout en VR.
3) Liste de course
Electronique :
- Un moteur électrique de scooter 350W 24V (Amazon, Aliexpress).
- Alimentation 15A 24V 360W
 . Ça peut être une bonne idée de prévoir le bouton d’arrêt d’urgence à ce niveau. L’alimentation peut aussi alimenter des bass shakers (Amazon, Aliexpress)
. Ça peut être une bonne idée de prévoir le bouton d’arrêt d’urgence à ce niveau. L’alimentation peut aussi alimenter des bass shakers (Amazon, Aliexpress) - Driver de moteur. Là, il ne faut pas lésiner. D’une part parce que la puissance demandée par le moteur est importante, parce que si le driver a un temps de réaction, le rendu sera moins convaincant. (Amazon, Aliexpress)
- Carte Arduino Uno. N’importe quel clone conviendra. Par contre les clones n’ont pas forcément les mêmes dimensions, et ne rentrent pas forcément dans la Control Box (Amazon, Aliexpress)
- Connecteurs XT60H. Ces connecteurs permettent de facilement débrancher le moteur (Amazon, Aliexpress)
Mécanique :
- Un harnais tensionneur 4 points. (J’ai testé 5 points, mais en tant qu’homme, je n’ai pas trouvé ça agréable, vous voyez ce que je veux dire ?) (Aliexpress).
- 0.1kg de pla pour imprimer l’enrouleur.
- Un SHF12 (se monte dans l’enrouleur, je conseille de prendre le Industry&CNC car ils fournissent l’adaptateur 8mm si l’axe du moteur est en 8mm) (Aliexpress, Amazon).
- Un câble de vélo. On en trouve dans les magasins de sport, en grande surface, sur Amazon ou Aliexpress.
Visserie :
DIN912 :
- 2 x Vis M4x15. Je recommande d’acheter des kits (Amazon, Aliexpress) qui contiennent les vis pour ce projet mais aussi pour de nombreux autres.
- 1 x Vis M4x40 (remplace la vis du shf12) (Aliexpress)
- 2 x Vis M6x25 (serrage du SHF12)
- 1 x vis M8x20 avec écrou pour serrer le câble.
DIN7991 :
- 4 x vis M6x15 pour fixer le moteur sur le support de moteur
- 4 x vis M8x20 pour fixer le support de moteur sur des profilés (profilés 8040 ou 10050 au choix)
- 2 x vis M8x25 pour fixer le harnais
4) Instructions de montage
NOTA BENE : Le tensionneur de harnais peut être dangereux. A pleine puissance, il sert énormément autour des clavicules. Il faut donc prévoir un bouton d’arrêt d’urgence.
- Effectuer tous les branchements hors tension.
- Effectuer tous les tests sans aucune pièce sur l’axe du moteur.
- Une fois les tests effectués, et la ceinture installée, effectuer les tests par paliers de 10% de puissance.
- Il faut impérativement construire la control box, il assure le bon refroidissement du driver. La documentation est accessible ici.
A. Driver :
- Retirer les deux vis :


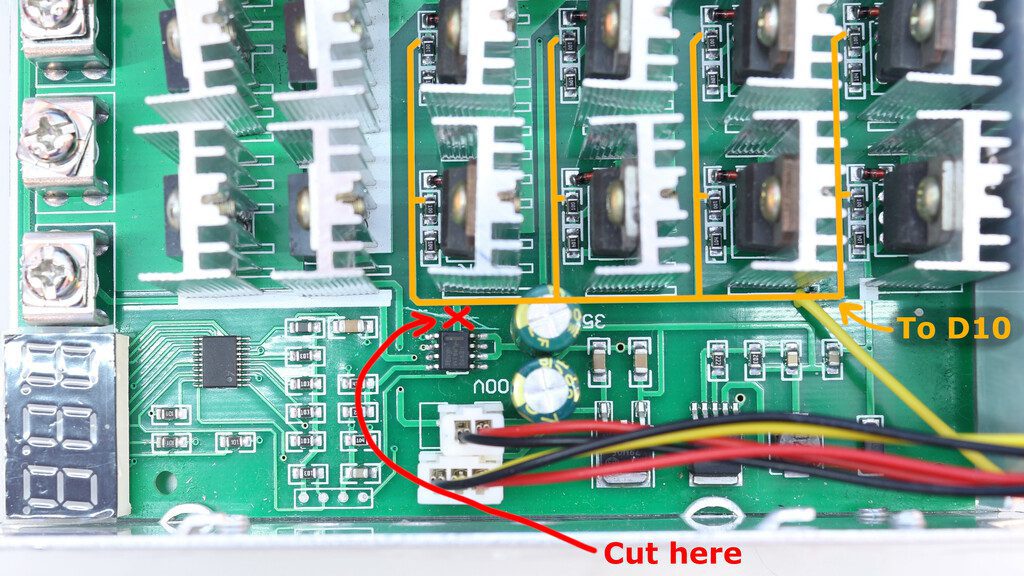
- A l’aide d’un cutter, coupé la piste au dessus du composant à 8 pattes. Toujours à l’aide du cutter, gratter le pcb afin de dégager la piste coloriée en jaune, puis y souder un fil, à relié au pin 10 de l’Arduino.

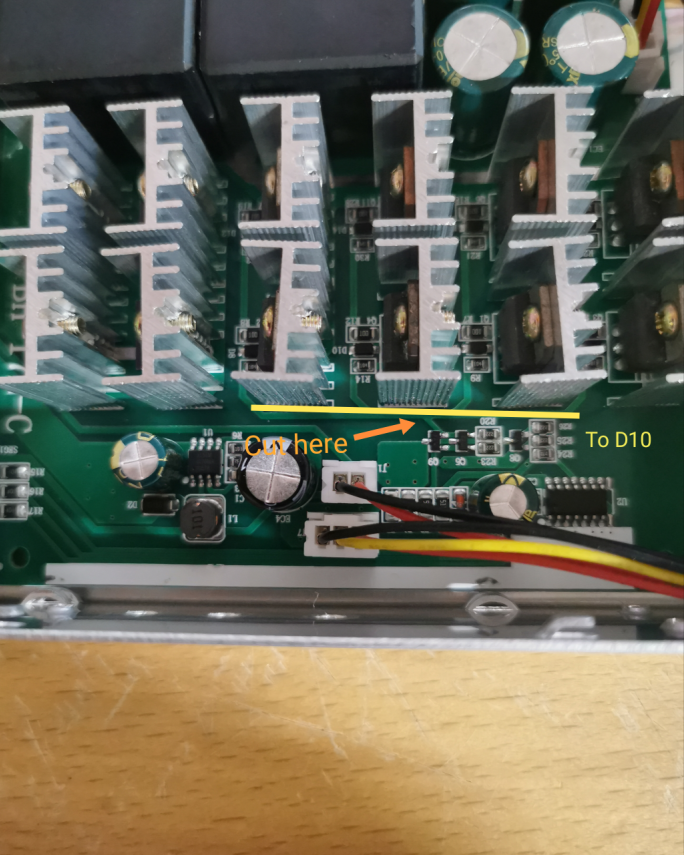
- Il est possible que votre driver soit une autre version (plus récente), dans ce cas, même procédure :

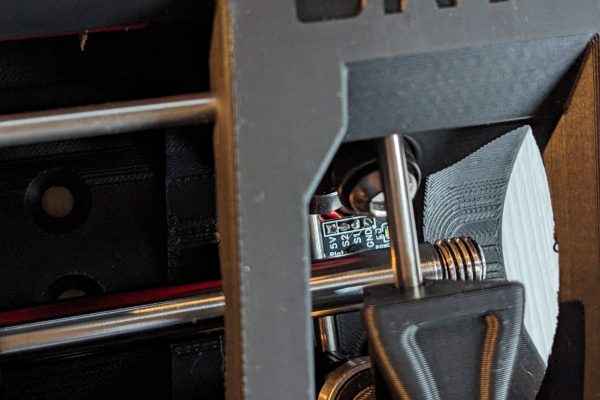
- Refermer le driver à l’aide des deux vis. Relier la masse du driver (Power -) à celle de l’Arduino (GND)

- Relier “Power -” à la borne “-” de l’alimentation
- Relier “Power +” à la borne “+” de l’alimentation
- Relier “Motor +” à la borne “+” du moteur
- Relier “Motor -” à la borne “-” du moteur.
B. Paramétrage de la carte Arduino sur Simhub :
- Sur Simhub : On y flash une arduino avec la fonction signal PWM (qui sert en général à driver des fans pour faire un simulateur de vent) et on lui associe la fonction décélération.
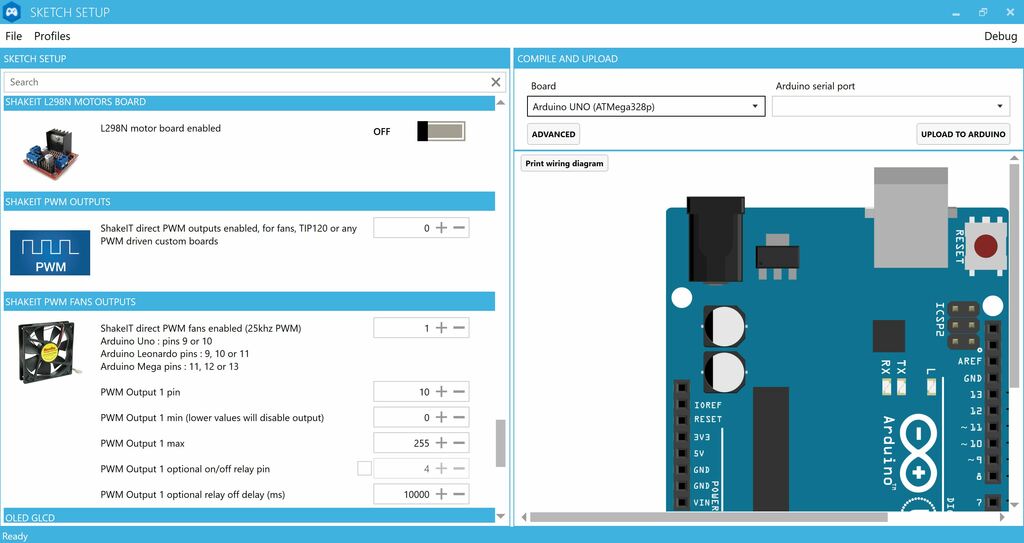

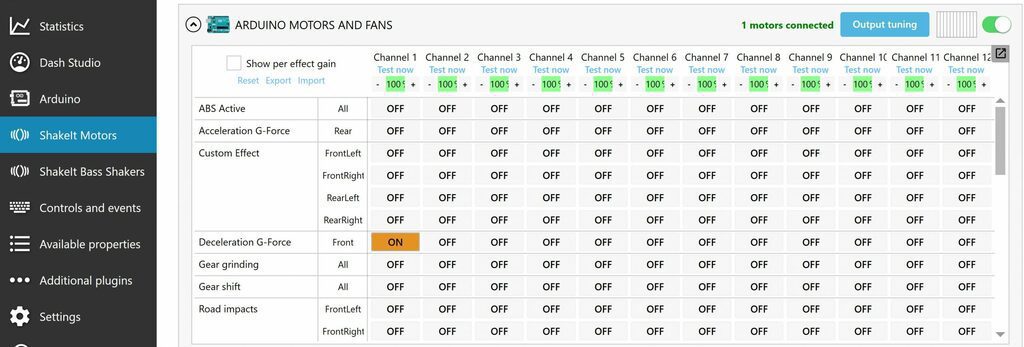
- On associe notre moteur à la fonction décélération dans l’onglet “motor output” de ShakeIt Motors :

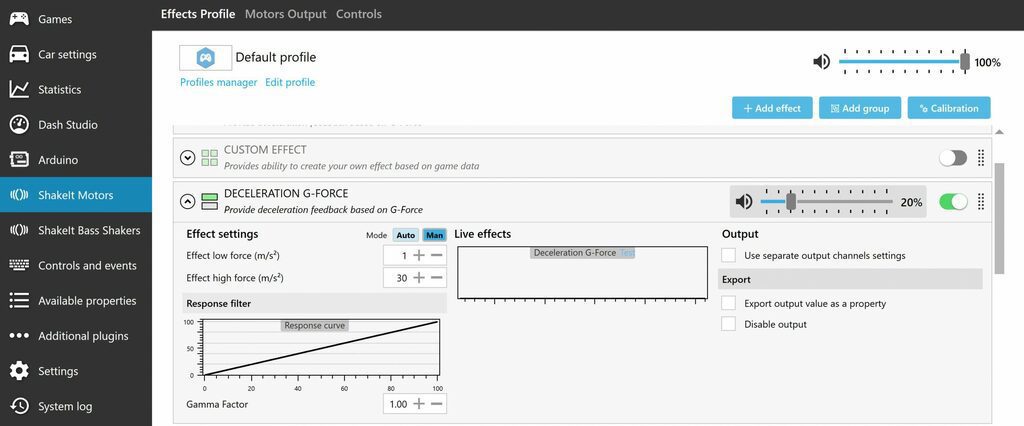
- On paramètre l’effet de décélération comme suit. Par sécurité, on augmentera la puissance par paliers de 10%. Attention, lorsque vous testez votre paramétrage en simulation, utilisez une voiture qui a une capacité de freinage importante (monoplace, F1…).



Salut 🙂 vraiment intéressant comme montage. Vivement que tu complète le tuto , je me lancerai par la suite 🙂
Cet été j’espère 🙂 J’aurai bien voulu changer de moteur pour repartir sur une base saine, et concevoir un support pour monter le moteur sur des profilés standards.
Bonjour lebois, après le freins hydraulique me voilà sur le tensionneur ^^ j’ai un petit problème pour la modif du driver, je ne retrouve pas sur ton site le schéma et je serais bien incapable de la réaliser avec les instructions écrites, peux tu me le transmettre ?
Voilà c’est remis en ligne ! Je bosse justement sur une nouvelle évolution !
Merci c’est top ! Hâte de voir ça 👍J’ai une idée de précontrainte “macanique” très simple, je te la présente dés que ce sera fonctionnel. Encore merci pour toute tes réalisations !
Salut Lebois. Penses-tu qu’il serait possible de séparer les deux points hauts de l’arnais (avec deux moteurs et deux enrouleurs) pour simuler un peu les G latéraux en plus des freinages ?
J’aime bien l’idée 🙂 En théorie oui c’est faisable. A mon avis le ressenti ne sera pas super méga génial, mais ça peut le faire. Perso en ce moment, je simule les freinages ET accélération, et c’est assez sympa aussi. Le soucis c’est que ça sollicite d’autant plus le moteur…
Bonjour, serait il possible de savoir comment tu as procédé pour dévisser le boulon de l’axe du moteur? Peut importe le sens dans lequel j’essaye…impossible de le faire bouger…
Merci
il faut le dévisser dans le sens inverse du sens usuel. Si tu n’y arrives pas par des méthodes conventionnelles, le plus simple est de fixer le moteur, et de le brancher (dans le bon sens) tout en maintenant l’écrou avec une clef
Je m’en suis sorti, merci beaucoup. Du coup j ai tout assemblé et câblé, flashé l’arduino via simhub et hors châssis tout à l’air de fonctionner, montage sur le châssis demain😊. Par contre je me demandais s’il était normal que mon ventilateur tourne continuellement? CaD avec simhub ouvert ou non et usb branché ou non. Merci beaucoup pour ce super projet.
J’ai monté la dernière version.
ça veut dire que le relais ne fonctionne pas correctement, et ne coupe pas l’alim. Ceci dit des fois quand c’est le premier branchement, il arrive que le relais ne fonctionne pas. Il faut alors rebrancher l’usb une ou deux fois
Effectivement je n’arrive pas à faire fonctionner le relais, quand je le shunt cela fonctionne, j’ai essayé avec 4 relais différents et bien vérifier le câblage. Dans simhub il suffit bien de flasher avec la sortie D10? Jusqu’ici je crois n’avoir réussi qu a le faire fonctionner avec la sortie 9 du coup. Merci
J’ai fini par trouver le réglage du relais sur simhub. Bon au final c’est vraiment génial! Le rendu est fabuleux, et la puissance disponible pour les différentes tensions est très impressionnante. J’ i personnellement placé un poids sur la ligne entre le moteur et le harnais, le fil étant perpendiculaire au sol cela permet de garder une petite tension sur le harnais et lorsque le moteur tire je ne pense pas que cela lui demande plus d’effort, il serait presque un poil aidé. Vraiment merci beaucoup pour se projet fabuleux et félicitations.
Bravo pour ce tuto vraiment très intéressant , merci . Il y a 3 semaine je ne savais pas ce qui était une carte Arduino, grâce à ton tuto je me suis intéressé et je voulais te présenter ce que j avais fait donc en m inspirant de ton tendeur de harnais j’ ai utiliser une visseuse 20 v comme treuil mais pas pour tirer sur un harnais mais directement sur le dossier du siège avec une liaison entre les câbles du treuil et le dossier ,de grosses sangles élastique , et le rendu est terrible le dossier s incline vers l avant d environ 2 cm car j’ ai limiter le débattement ce qui suffi largement avec le ressenti des sangles élastique pour donner de super sensations , que soit au freinage,au passage de vitesse ou sur les bosses vraiment top . Encore merci a toi pour toutes tes infos partagé .
Salut ! Comment tu as réglé sur simhub car en D10, j’ai mon relais qui fait un petit “clic” quand je test mais le moteur ne tourne pas. Pareil si je règle sur simhub en sortie D9 (où est branché le driver).
Salut LEBOIS, tu parle à un moment de vouloir changer de moteur pourquoi ce n’est plus celui de la video que tu utilise?
Dans C Installation de l’enrouleur on voit une image de l’enrouleur peux tu nous dire ou peut on trouver cet enrouleur?
Bonne continuation dans tes projets, Rock
Il ne me semble pas avoir parlé de ça. En tout cas non le moteur est très bien. L’enrouleur est imprimé en 3D.
Salut Lebois,
Aurais-tu un lien vers les fixations avec roulements à bille ainsi que la tringle que tu utilises à l’arrière de ton baquet pour faire glisser le harnais?
Les équerres de support sont imprimés en 3D? Et comment les as-tu attachés à ton baquet? Vissés dedans ou velcro industriel?
les roulements sont des kp001. Le support est en forme de crochet, mais de velcro ou autre et ça tient parfaitement.
Top, merci! Aurais-tu un lien (Aliexpress ou autre) pour les supports en forme de crochet?
Et du coup, la tringle c’est aussi du 12mm de diamètre comme les KP001?
Tout d’abord félicitation pour ce projet et un grand merci pour le partage.
je rebondis sur la question de Simon pour 2 moteurs (pris en charge par SimHub 2 Dof) Que faut-il modifier au niveau du matériel, faut-il tout doubler? ex 2 Carte Arduino Uno, 2 Driver de moteur, 2 Alimentations 15A 24V 360W etc…
un seul arduino, tu aura simplement 3 fils a brancher, un gnd, un sur le pin 10 et sur le pin 11. deux drivers oui mais tu peux prendre une alim de 30A plutot que 2 de 15A
Bonjour, suite à un petit arret de la simulation je n’ai pas utilisé le tensionneur durant 2 ou 3 mois cela m’a permis d’imprimer les nouvelles pièces. Aujourd’hui je tente de le relancer, tout se passe bien sur simhub durant mes premiers essai je monte la valeur de tension petit à petit et passé 80% le moteur donne des petits coup comme lors d’un déclenchement abs et puis rien du tout plus de ventilateur dans le boîtier non plus après divers relance rien n’a jamais refonctionner. Une idée d’où cela pourrait provenir? Merci
Bonjour
Le tension fut de harnais peux se fixer sur un châssis tubulaire? J’ai pas vu d’école et les pièces pour.
Est il possible de te le commander monter pour un châssis track racer TRX ALPINE?
Je suis pas du tout bricoleur.
Merci de ton retour
Oui j’ai déjà dessiné un adaptateur pour ce châssis
Bonjour Lebois Racing , juste si tu pouvais faire un petit tuto pour la precontrainte de 10% du moteur du tensionneur de ceinture .Merci
il faut mettre un effet continu, genre le vent
ça ne risque pas de faire chauffer et à terme cramer les bobines du moteur d’avoir une charge constante??
Salut merci pour ton tuto au top.
Je suis en train de m’en servir mais je voulais savoir sur le driver il il a un potentiomètre de brancher dessus ,il faut le laisser brancher ou on peut le supprimer ? Sinon, à quoi sert t’il ?
Merci pour votre réponse.
Nico
A quoi sert aussi l’interrupteur svp?
à rien à part mettre le power sur on.
moi je me suis pas pris la tête, j’ai imprimé un pallier à roulements à billes d’airsoft que fixerai directement sur le siege avec des vis à tête fraisée coté tête, sous le tissus
https://photos.app.goo.gl/4nWsejjZDMD9ZM4k6
bonjour j ai vu que vous parliez de fans. j aimerai me lancer dans ce projet qui pour un début me semble plus raisonnable 🙂
pourriez vous me dire :
il me faut une arduino et motor shield (gestion 4 moteurs j aurai aimé car si ça marche j essayerai les vibreurs pour les pedales).
merci de vos conseils
regarde dans la liste de course, tout est indiqué.
Bonjour,
J’ai essayé cette solution et ça marche bien c’est convaincant !
Cependant j’ai un sifflement continu qui vient du moteur et qui devient plus fort avec le gain qui augmente. Il est assez dérangeant.
Est ce que je suis le seul à avoir cela ?
Sur les vidéos je n’ai pas l’impression qu’il y ai ce sifflement est ce que vous avez une solution pour l’éliminer ou n’est il juste jamais apparu ?
Merci d’avance !
bonjour a tous et felicitation pour ce fabuleux projet moi j’ai un prob sur le vario j,ai beau suivre le tuto a la lettre lorsque je teste l’arduino sur la borne d10 j,ai bien un signal pwm j,ai mis en place une led avec resistance sur pin10 et gnd pour voir de visu le signal mais rien ne se passe sur le moteur je fais le test dans simhub je vois bien le front montant et descendant ma led s,allume bien mais le moteur nada help me please ? j,ai bien coupé la piste et soudé le fil vers d10
suis desesperé il y a pas un autre moyen pour declencher le moteur ? mes relais fonctionne nt bien lorsque j’appuye sue l,interet il y a bien100 sur les digits
tu as testé le driver avant de couper la piste ?
oui il fonctionne
laon voit que le moteur essaye de demarer mais rien
bonjour à toi et bravo pour ton travail.
A tout hasard, revendrais- tu un kit complet de ton dernier tensionneur GT ?
je ne suis pas du tout Do it yourself à ma grande tristesse.
merci pour ta réponse.
Olivier de PAU (64)
salut, contactes moi en mp sur discord 🙂